Prawie rok temu pisałem o tym jak zbudować quadcopter. Od tego czasu wiele się zmieniło nie tylko u mnie na pokładzie. Quadcopter już nie jest dobrą nazwą dla czterosilnikowego obiektu latającego. Teraz popularną i modną nazwa jest po prostu dron. Na początku lutego pisałem o nowej ramie Diatone #37, która była zbudowana z włókna szklanego i była mocna do pierwszego dzwona w ścinę pustostanu. Filmik można zobaczyć na moim kanale youtube. Przyszedł czas aby zakupić coś z karbonu, padło na bardzo popularną ramę ZMR250.
Stara rama z włókna szklanego była całkiem fajna ale najsłabszym punktem okazała się płytka PCB dostarczająca zasilanie (PDB). Również dolna płyta trzymająca jest bardzo giętka. Pewnie za sprawą dużej ilości otworów. Parę fotek poniżej.
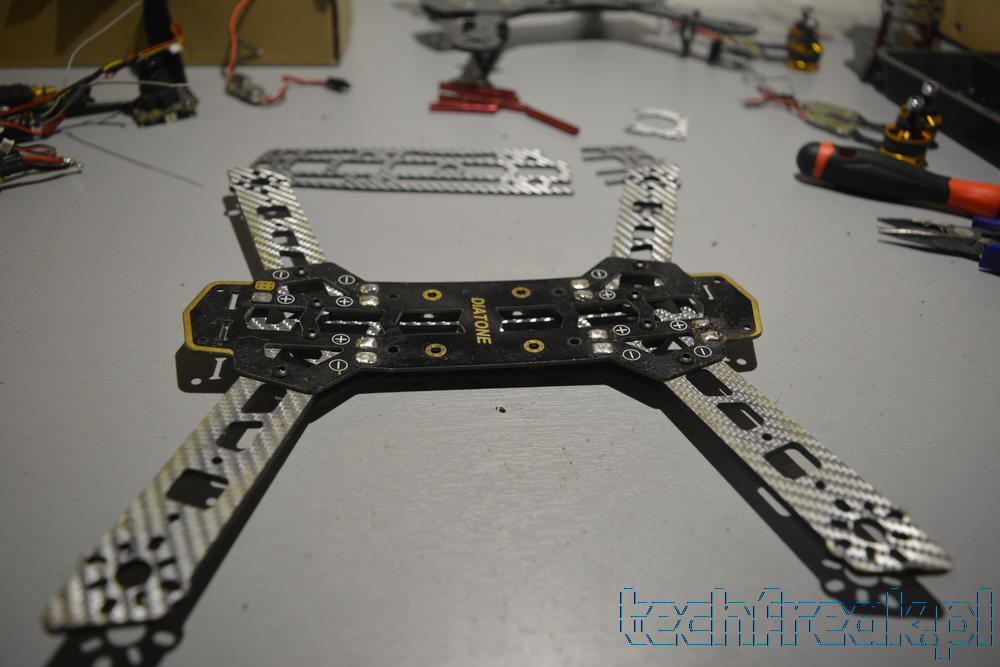

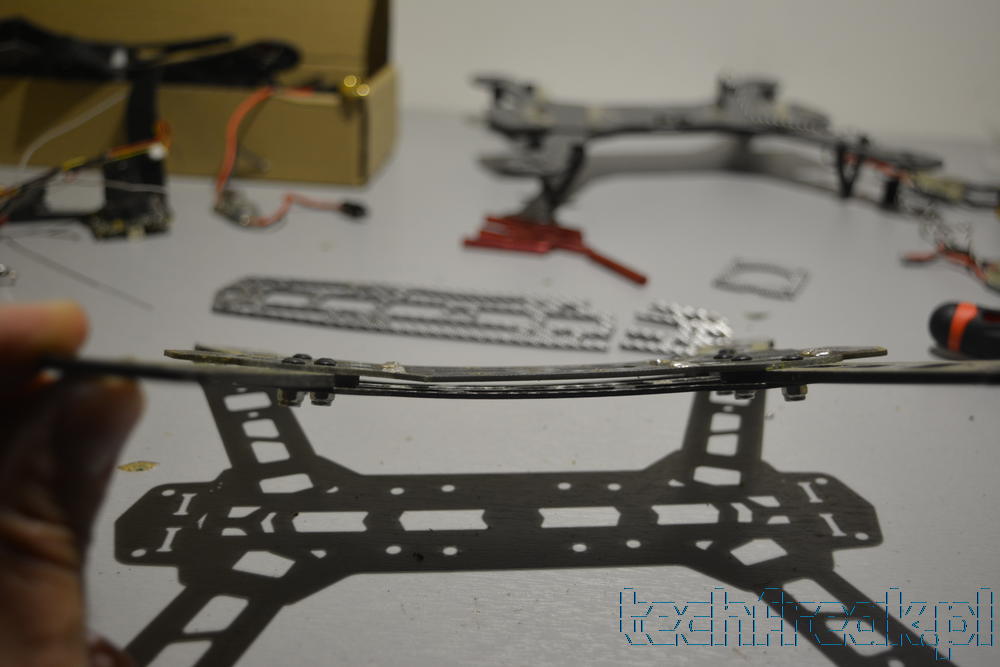
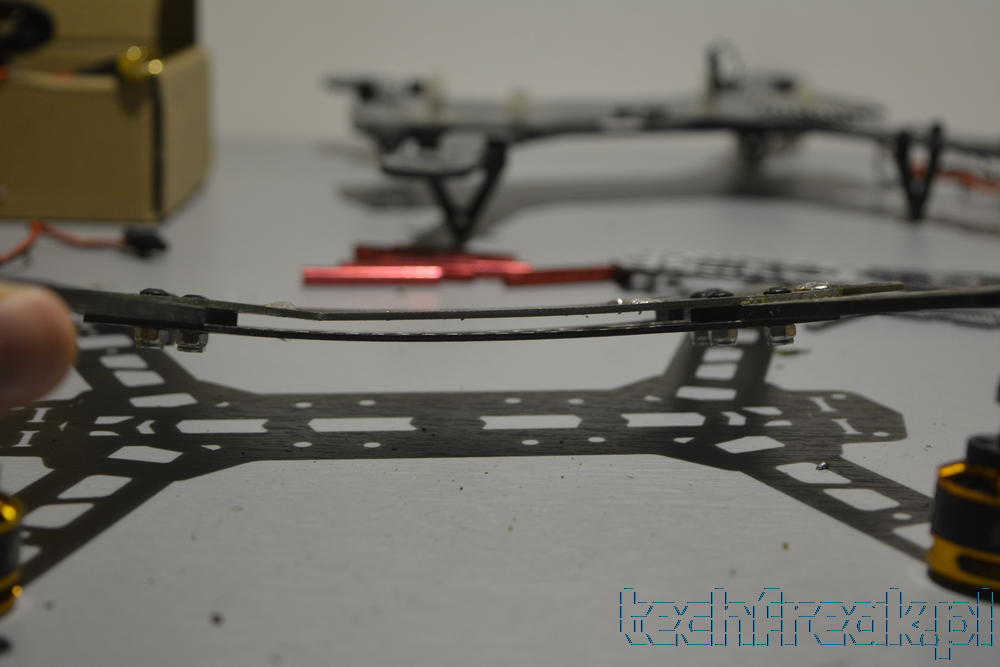
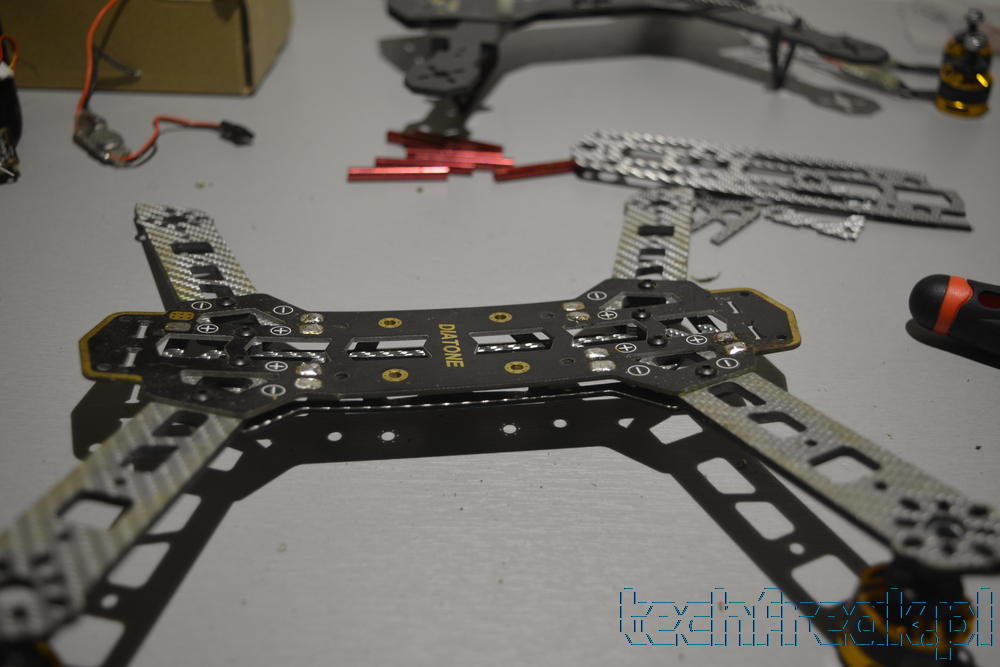
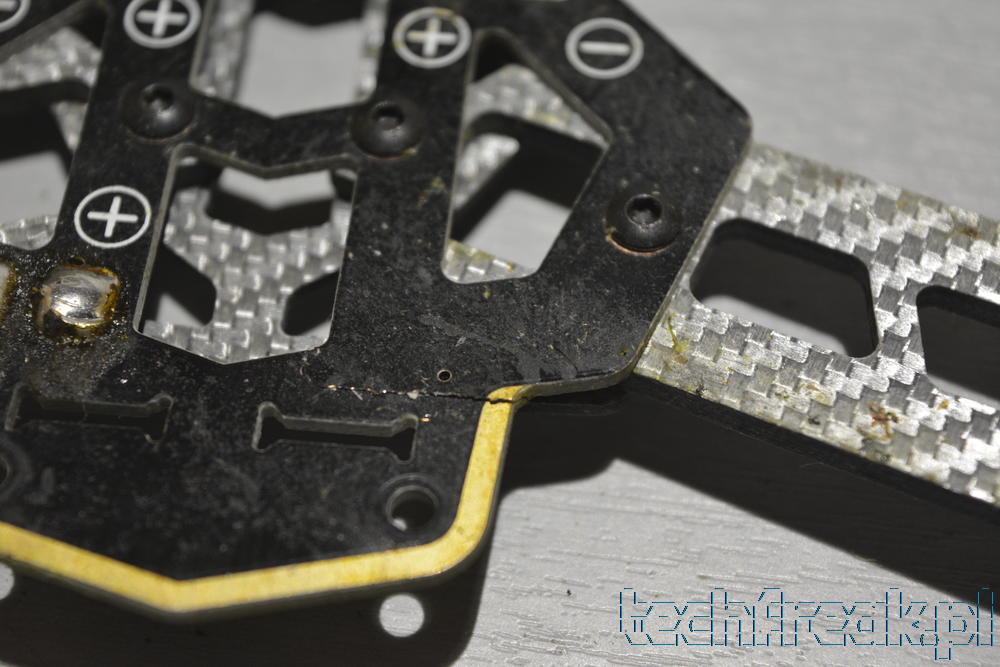
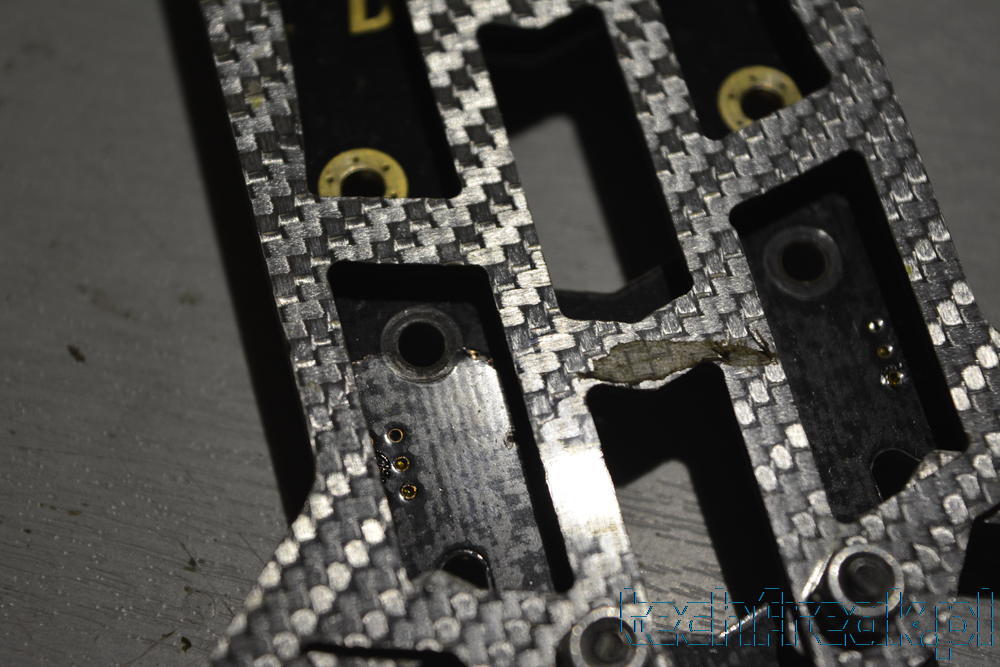


Jak widać powyżej rama trafiła na ścianę „odpoczynku” wraz z pierwszą FPV250.
ZMR250
Nową ramę zamówiłem na banggood. Czytałem że może nie być zgodna z różnymi PDB. Jednak okazało się, że otwory są zgodne i wszystko pasuje. Dopasowywałem ją do PDB od Diatone i RCX z myrcmart.







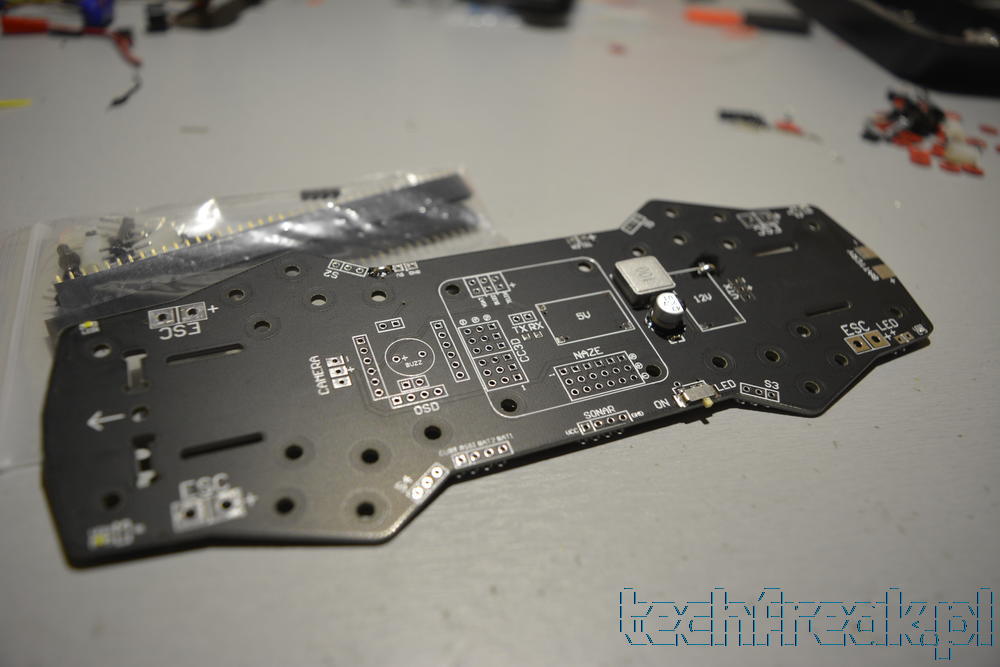
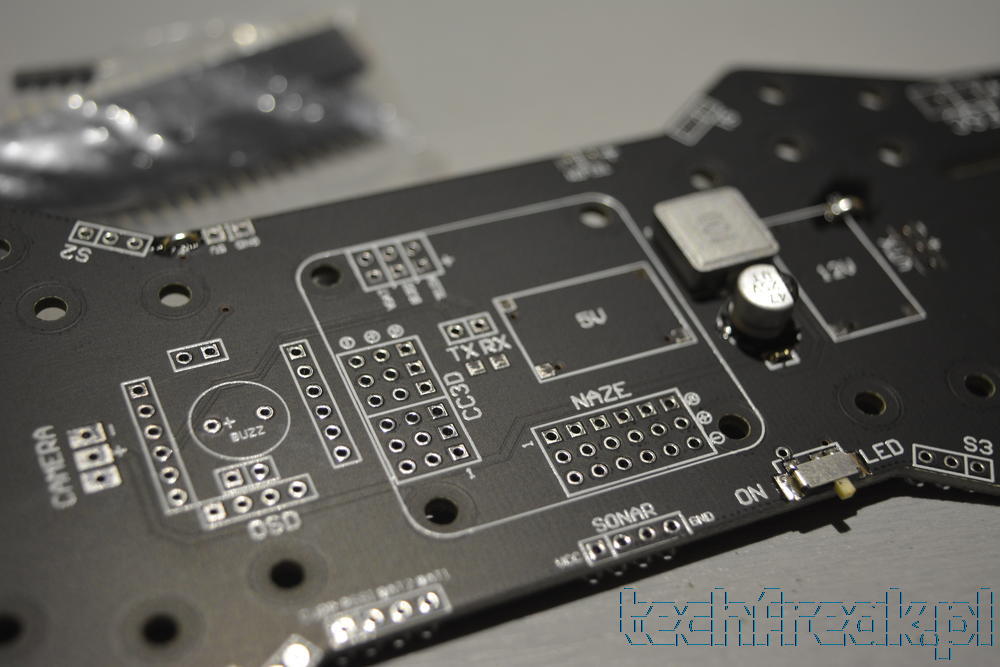
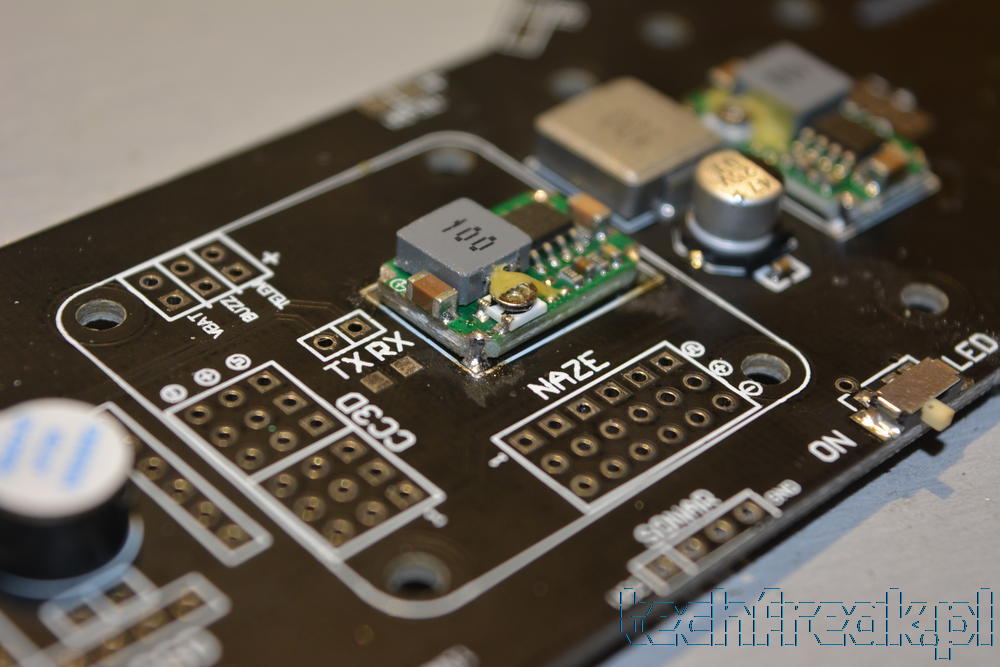
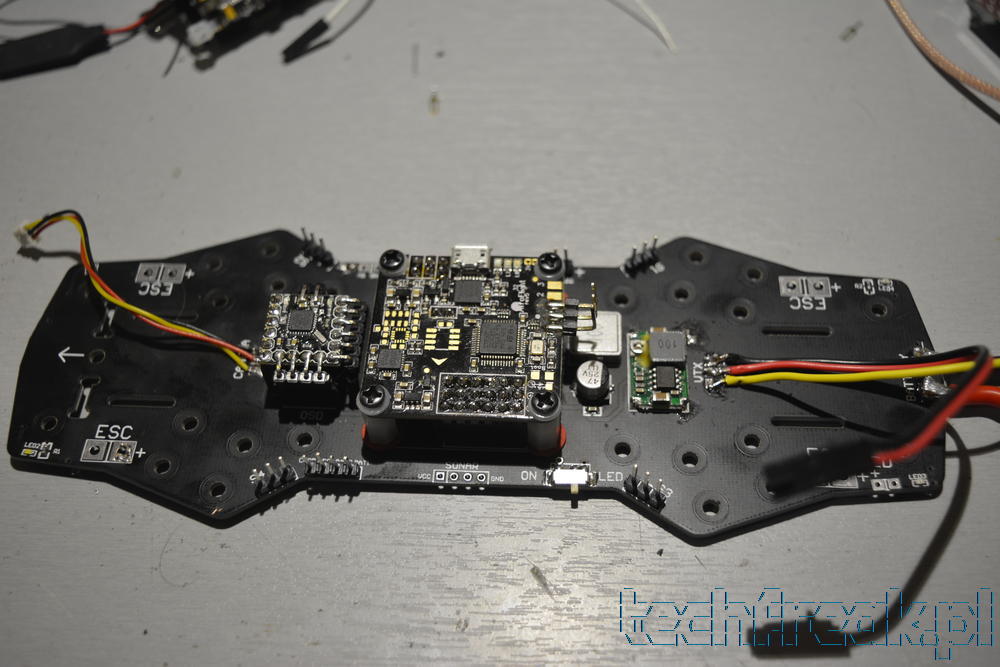
RCX H250CF PCB
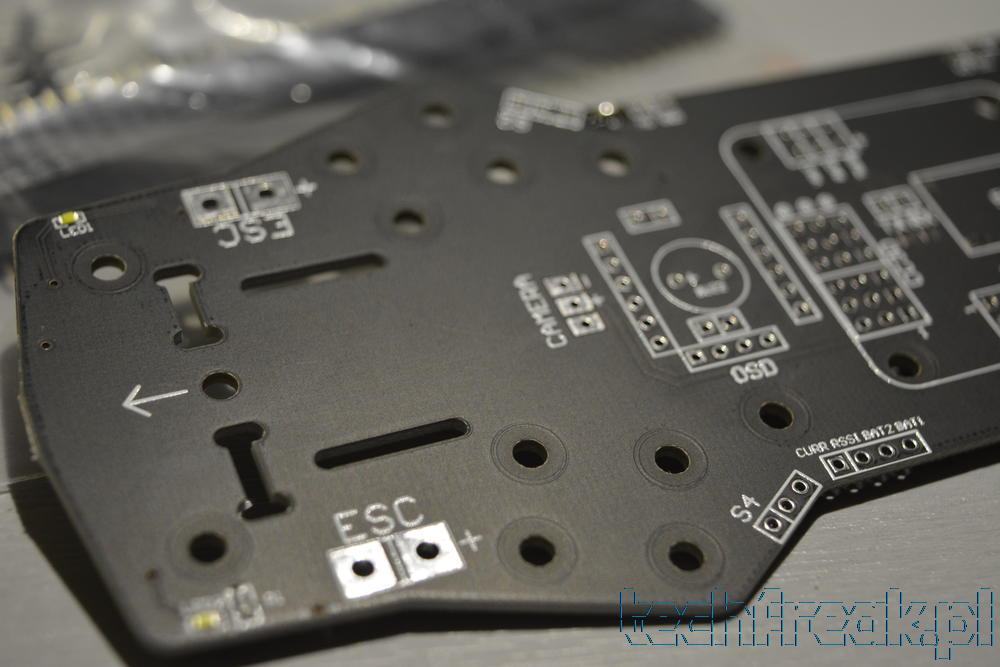
Poprzednia płytka do dystrybucji zasilania była tylko płytką do dystrybucji zasilania ;) I była w zestawie diatone #37. Nowa rama ZMR250 nie zawiera w sobie żadnej płytki PCB. I trzeba zakupić coś we własnym zakresie.
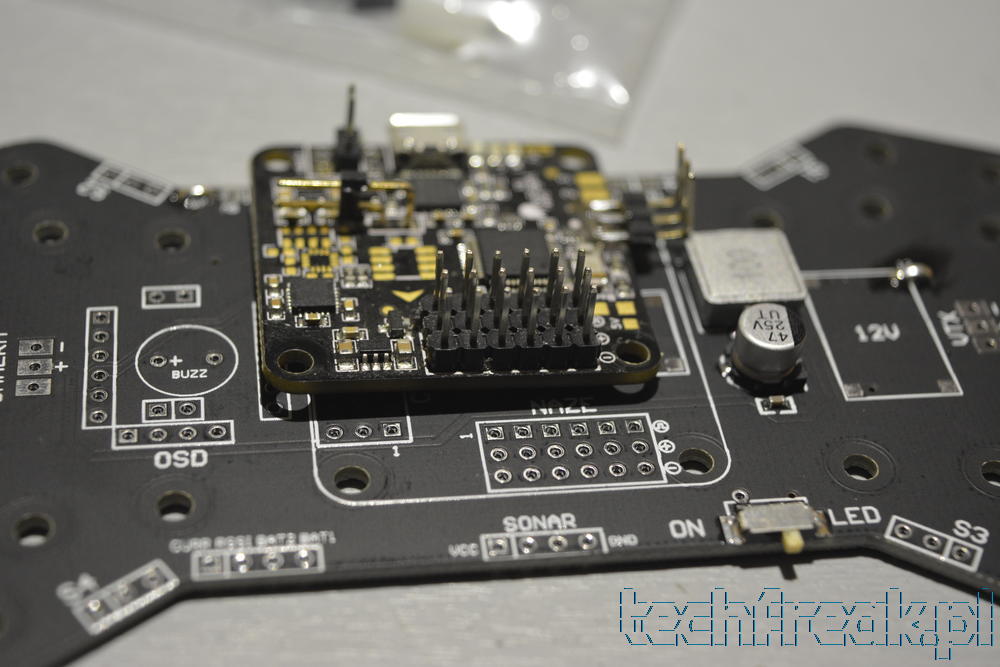
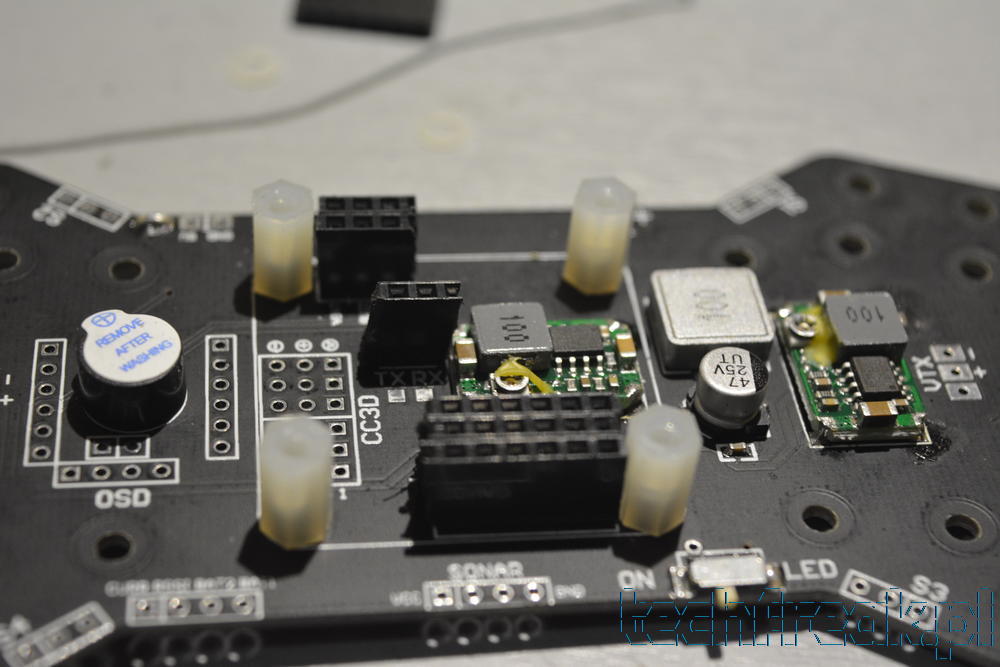
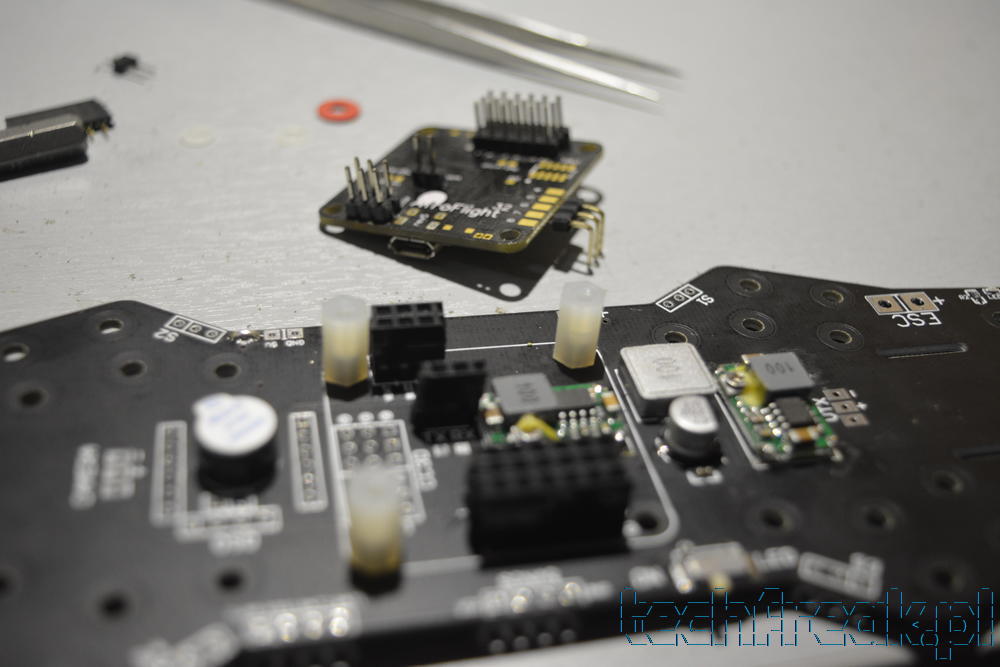
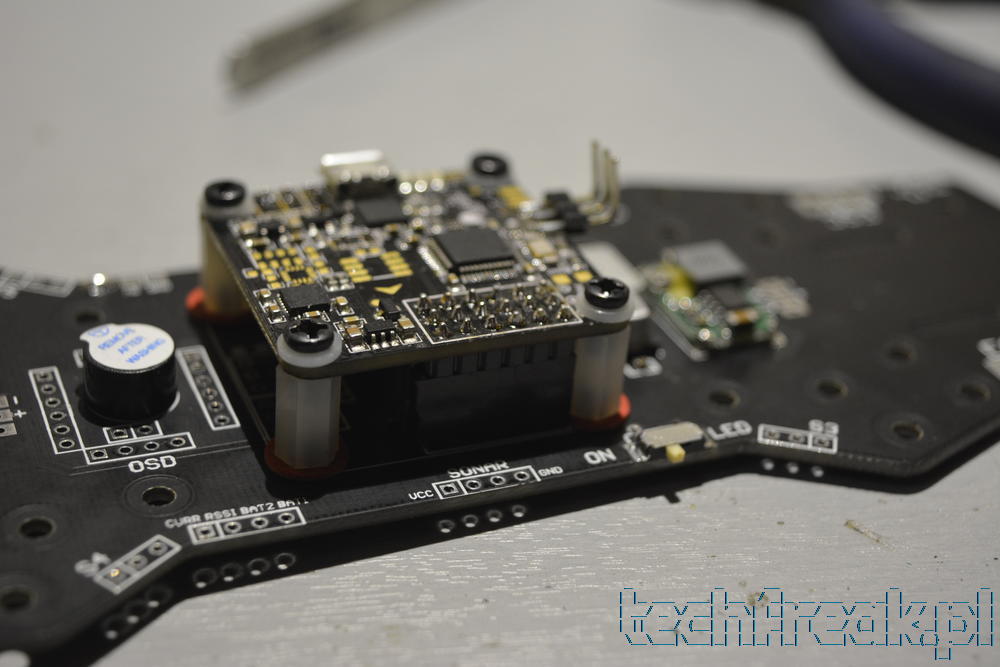
Co jest zainstalowane na takiej płytce PCB? Na pierwszym miejscu zawsze jest dystrybucja zasilania. Gniazdo instalacji FC dzięki któremu instalacja polega tylko na wsadzeniu kontrolera. Zintegrowane zasilanie BEC dla FC i wideo. Zintegrowany buzzer i diody LED. Brak przewodów. Możliwość instalacji OSD.
Do wyboru jest parę opcji:
Gdy wybierałem RCX nie widziałem że, cytrynka doczekała się wersji pod naze32 bez przejściówek. Jako że, ta wersja jeszcze nie jest dostępna. Zacząłem budować na tym co mam. PCB od myrcmart wybrałem w full wersji czyli z mini BEC +5V i +12V i micro MinimOSD. OSD to dla mnie nowość dlatego że, tak naprawdę mam powiadomienia głosowe z taranisa. Aparatura powiadamia mnie o słabym zasięgu lub słabej baterii. Z jednej strony jest to jeden punkt awarii na torze wideo ale co tam zobaczymy czy się przyda.





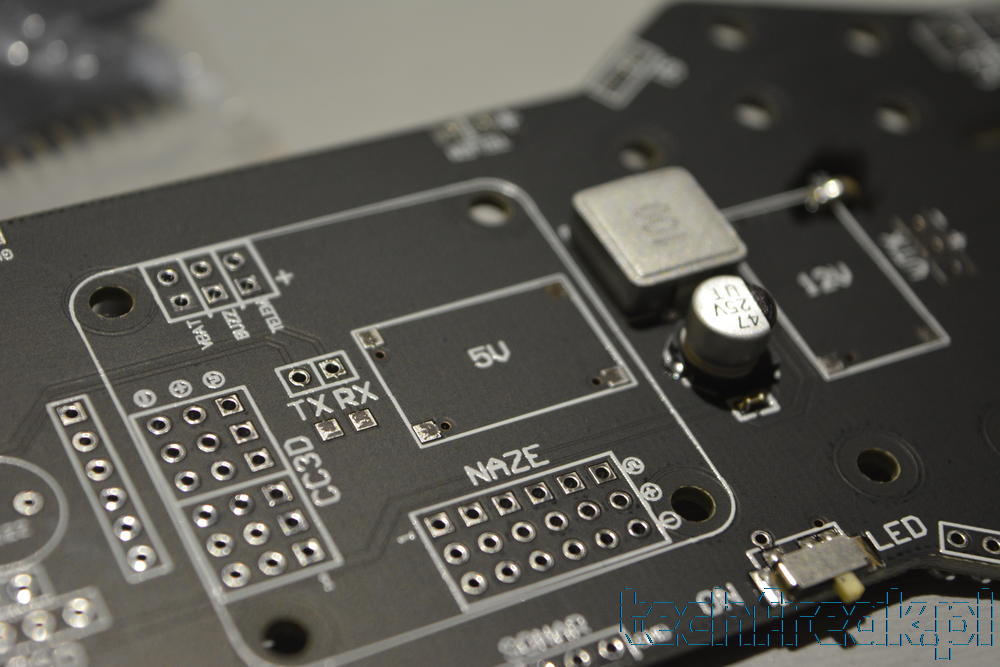
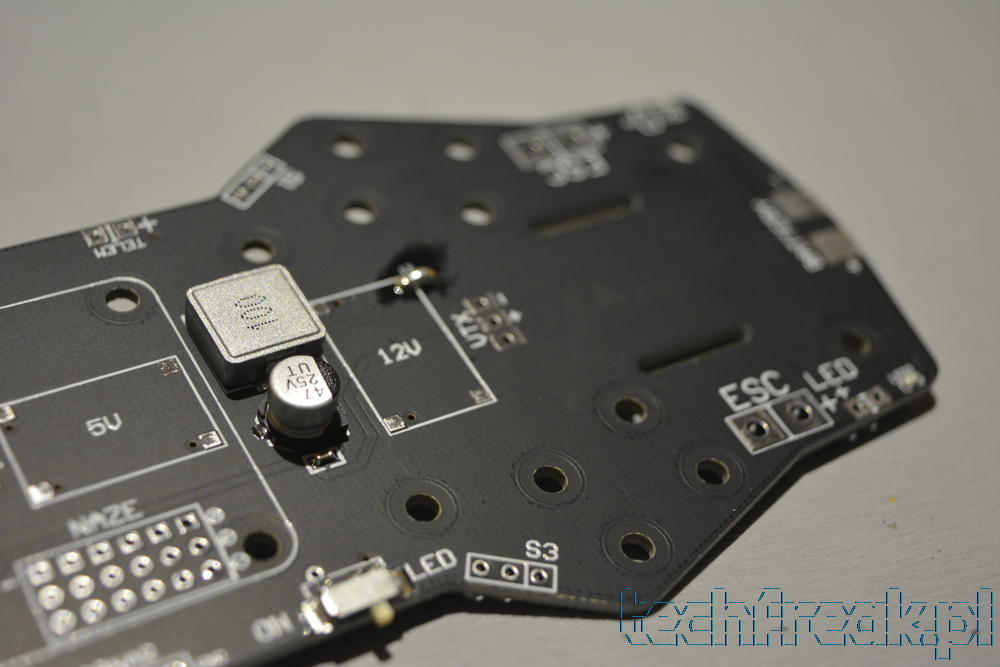
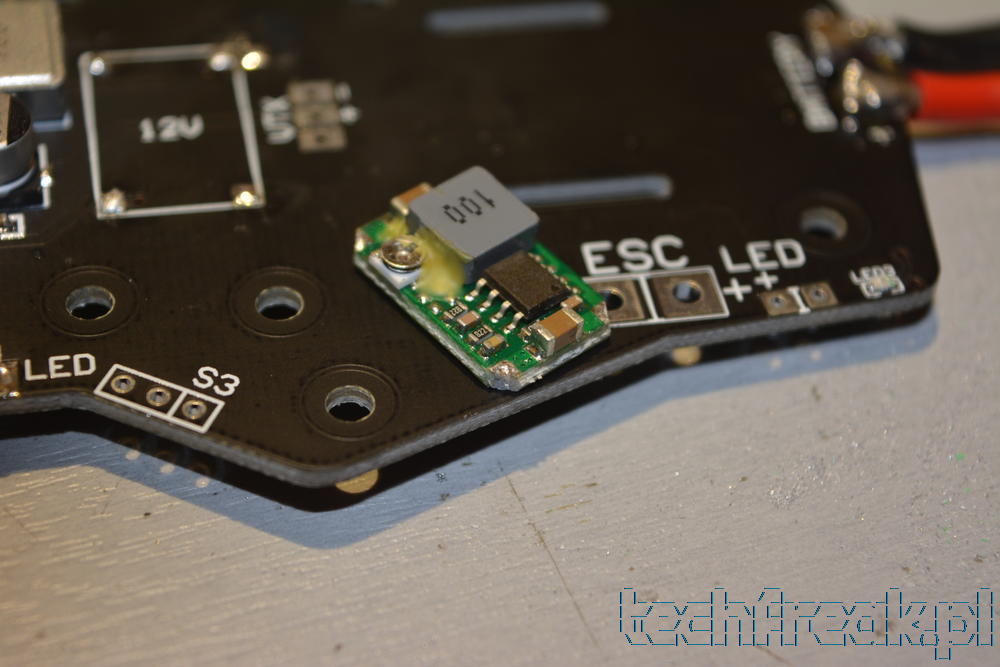
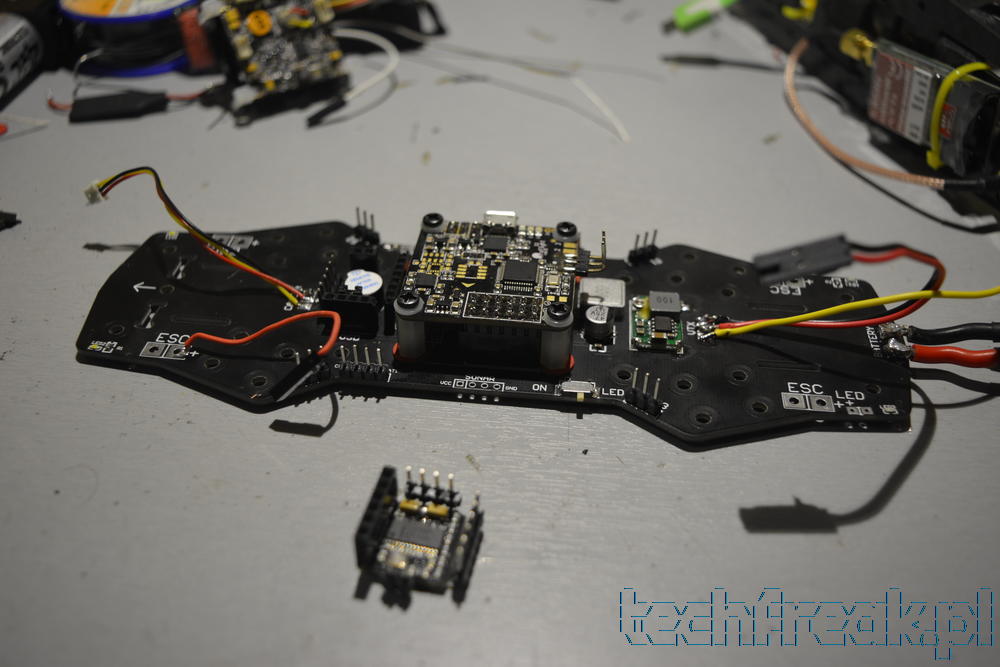
Wszystko było fajne do momentu instalacji BEC 5V i 12V. Autorzy założyli że, montowanie BEC’a do PCB będzie odbywać się poprzez nałożenie cienkiej warstwy cyny na obydwa podłoża i zgrzewanie ich od góry, od strony BEC. O ile miało to by sens przy lutowaniu powietrzem to lutownicą nie miało sensu. Nie mówię, że się nie da. Nie było to jednak pewne połączenie dla mnie. Dlatego wpadłem na pomysł podpiłowania rogów aby dojść do punktów lutowniczych z boku. Nawet myrcmart spodobał się ten pomysł, maja za jakiś czas zaktualizować stronę z moimi fotkami :)

LED
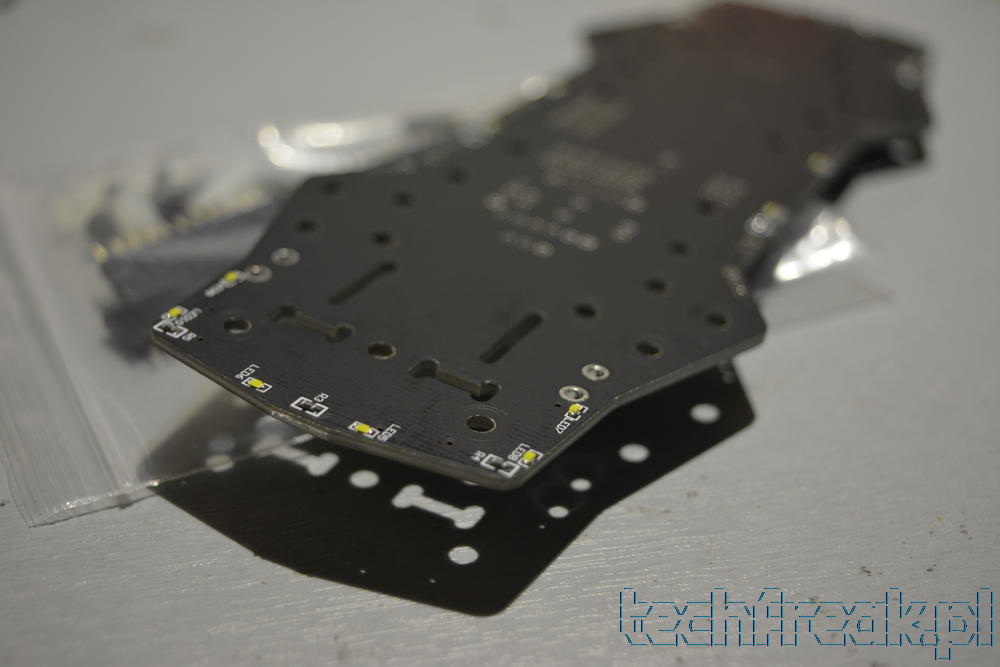
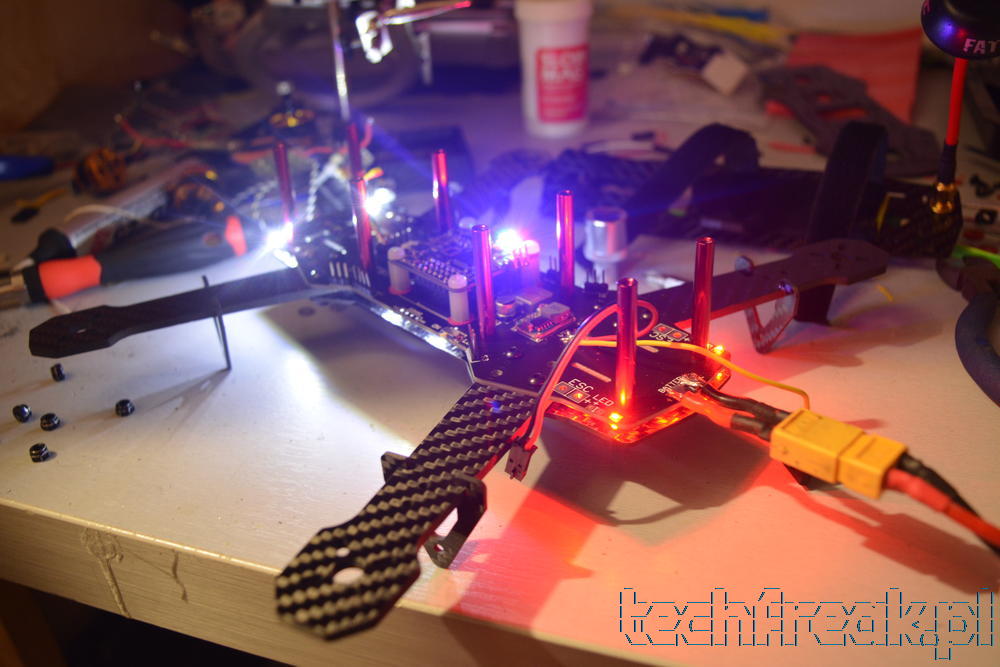
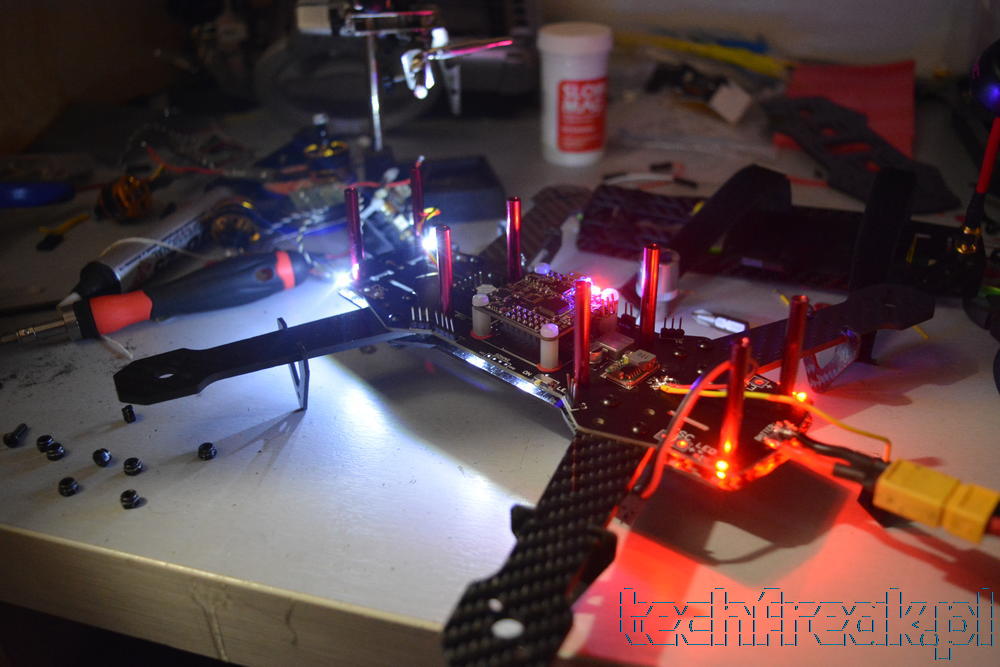
Bardzo fajną zaletą power boardów jest to, że maja zintegrowane oświetlenie. Z tyły czerwone diody a z przodu białe. Dodatkowym atutem RCX jest zintegrowany włącznik oświetlenia. W zasadzie przełącza on pomiędzy wbudowanymi diodami a tymi które opcjonalnie można zainstalować.

Micro MinimOSD instalacja
Na płycie RCX znajduje się miejsce na micro minimOSD o którym napisze zaraz. Warto wspomnieć że, nie trzeba go instalować. Ponieważ na linii video można założyć zworkę i nie korzystać z OSD. Ja poniżej pokaże jak ja zainstalowałem gniazdo pod OSD. Wybrałem taki sposób aby mieć możliwość łatwego łączenia micro OSD z przejściówką USB-UART. (na obrazku FTDI 232RL)



micro MinimOSD soft
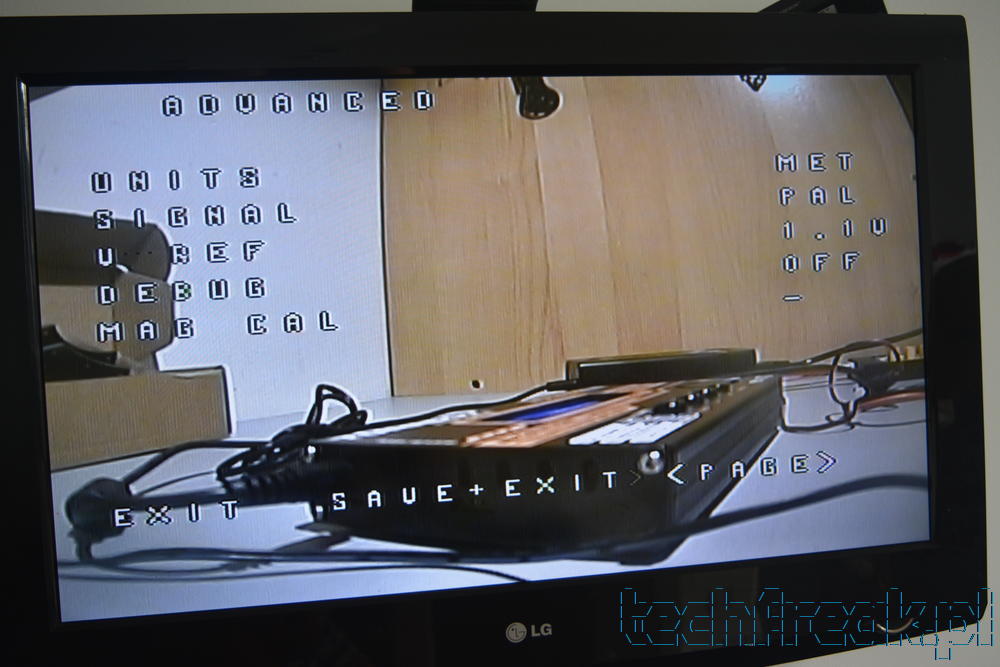
Moje micro OSD po wgraniu programu MV OSD poprzez arduino pokazywało na ekranie same duże literki V. Po ściągnięciu MV OSD w paczce jest program do arduino i GUI do ustawień. I to właśnie przez GUI trzeba wgrać fonty aby OSD poprawnie wyświetlało znaki. Robi się to w lewym dolnym rogu programu w menu font tools.

W późniejszym czasie doczytałem, że przez minimOSD i cleanflight można sterować np. PIDami a kontrolerem jest aparatura. Bardzo fajna sprawa, nie trzeba łączyć się po bluetooth lub podłączać komputera.


Moje okulary maja możliwość podłączenia wyjścia s-video np. na telewizor. Robi się to kabelkiem z zestawu.

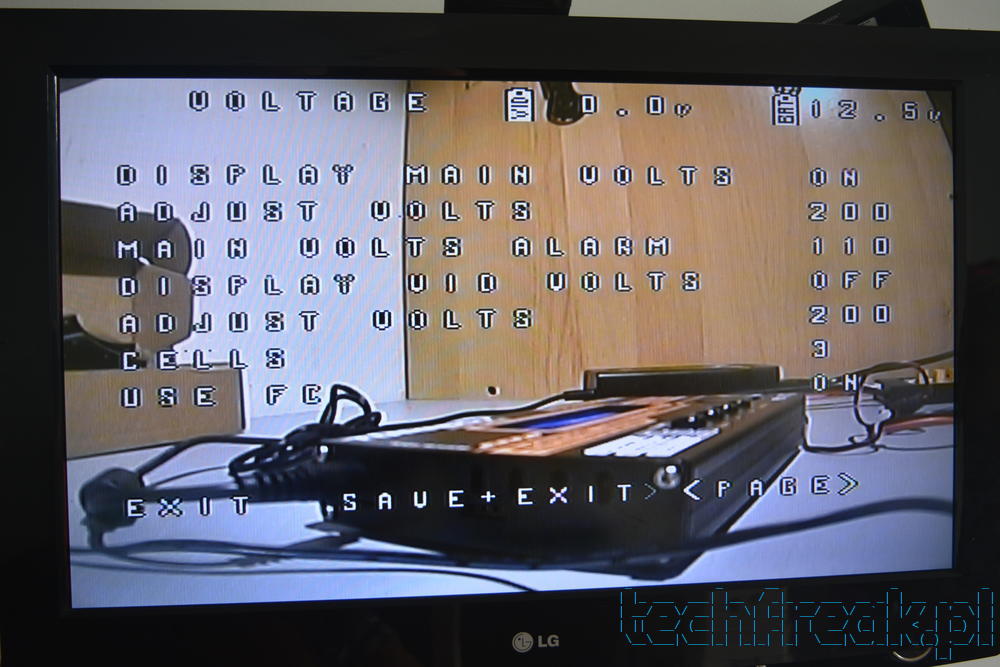
OSD Volt & RSSI
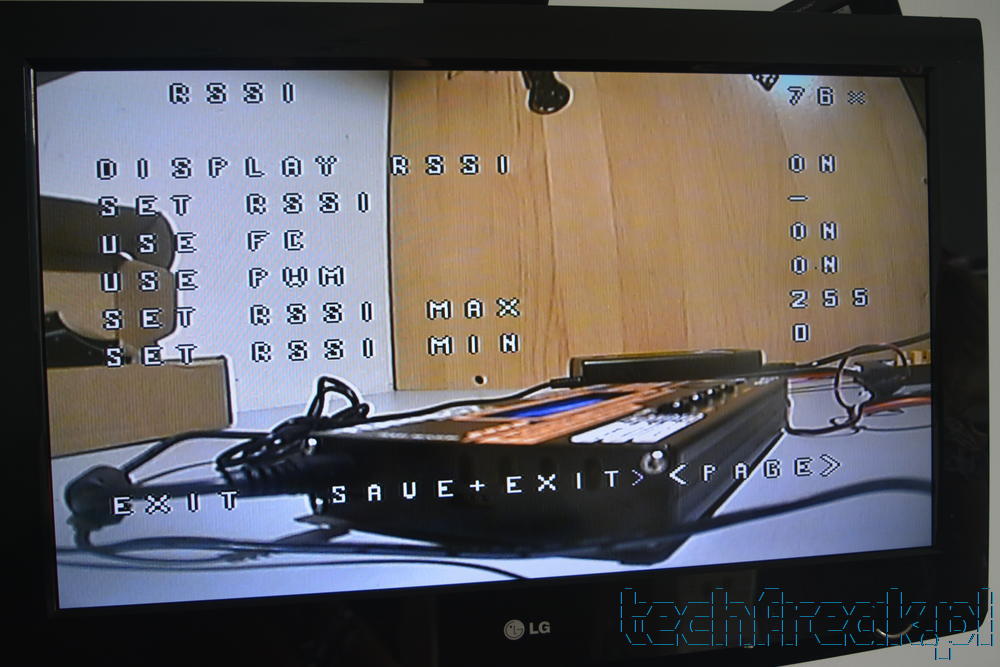
Mi wiele nie jest informacji potrzebnych na OSD. Chociaż awaryjnie napięcie i RSSI przydało by się na pewno. Z napięciem nie ma problemu bo naze32 ma bezpośrednie wejście i z płytką RCX nie trzeba nic podłączać. To z rssi trzeba skonfigurować cleanflight i aparaturę taranisa. Poniżej opisze jak to zrobić ale na odbiorniku D4r-II, cleanflight, aparatura taranis. Jest to dość popularny zestaw i wyróżnia się tym że ma telemetrię.
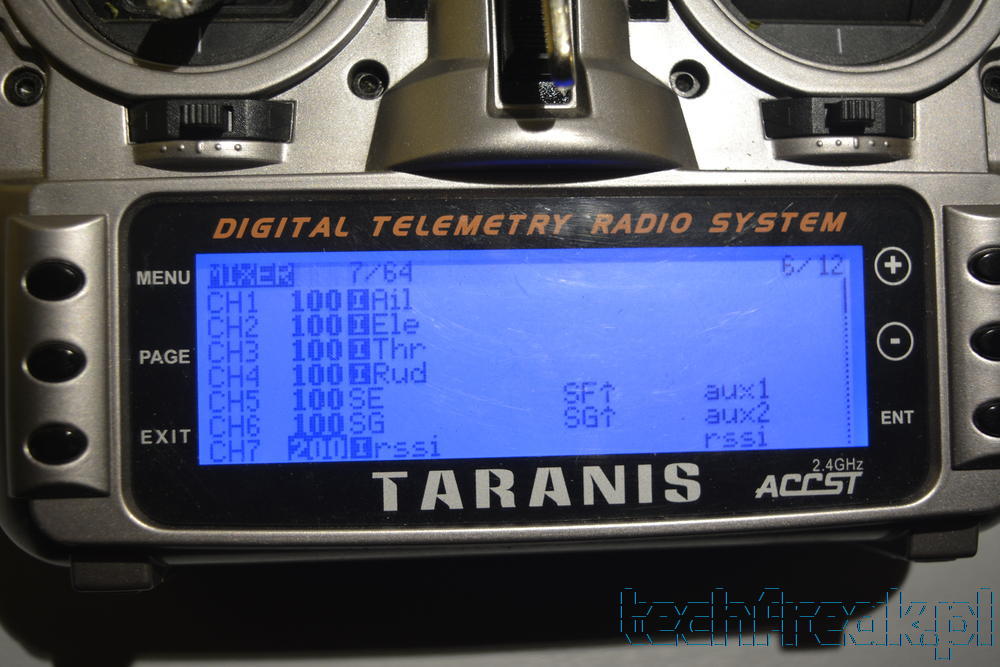
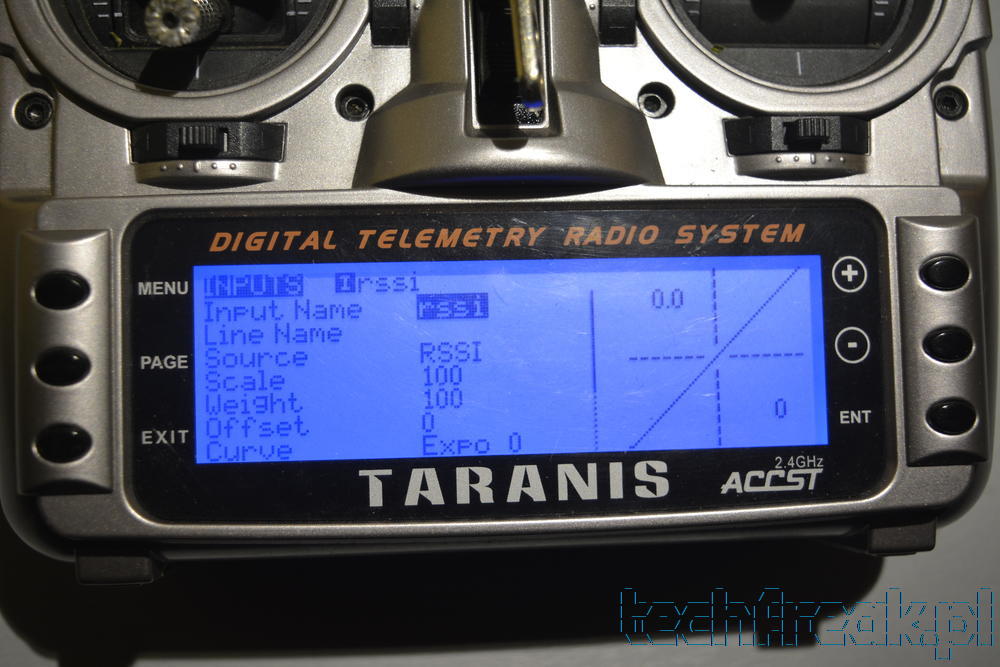
W taranisie trzeba włączyć aby aparatura przesyłała wartość RSSI na jakimś wolnym kanale. Ja mam zaktualizowane oprogramowanie w FrSky D4R-II więc mam osiem kanałów. Jak to zrobić pisałem w poprzednim wpisie. Ja wybrałem siódmy kanał.


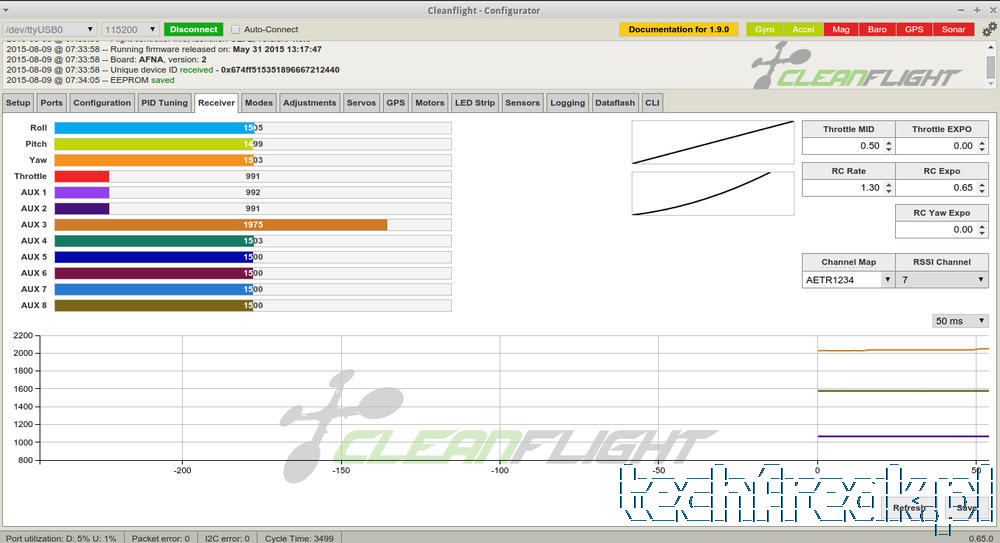
Ok jak aparatura już przesyła wartość RSSI do odbiornika a odbiornik po PPM do FC to w cleanflight trzeba wskazać na którym kanale jest to robione. W reciever szukaj RSSI channel.

No to buduje dalej
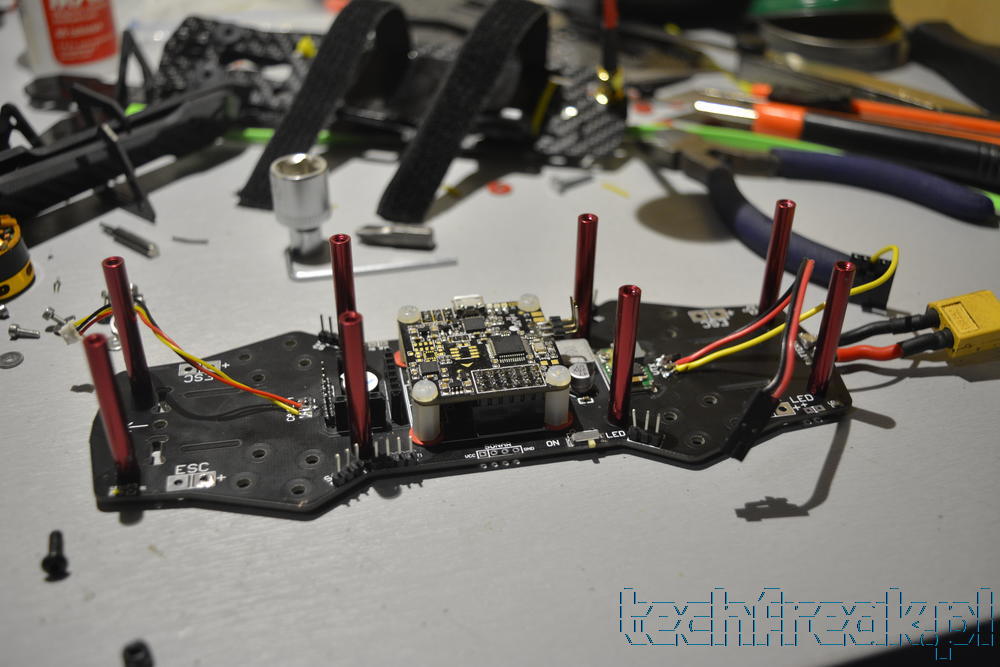
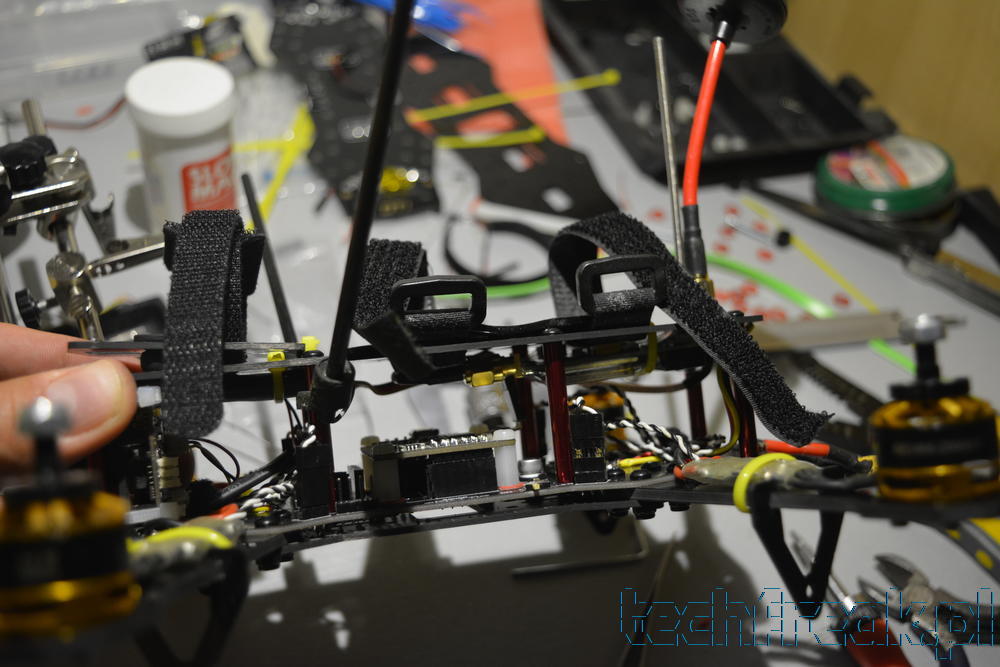

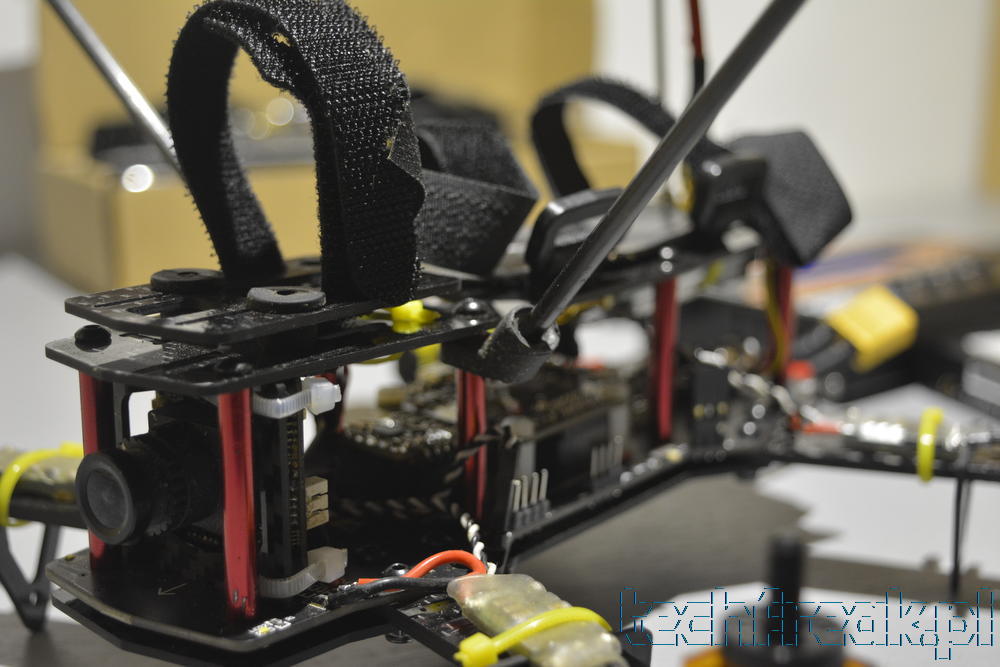
Tips: Antenki do odbiornika
Ważne żeby antenki od odbiornika były wysoko i były zamocowane w kształcie litery V. Ja z gumowych części od latawca i karbonowych kijków wymyśliłem takie mocowanie jak poniżej. Zalety są takie że taka instalacja jest odporna ma wypadki. Gumy powodują, że kijki się zginają a nie łamią. Po takiej instalacji nie byłem już alarmowany o słabym zasięgu linku rc. Jak by ktoś chciał skorzystać to cześć się nazywa „lateral conector”, łącznik na skrzydle.
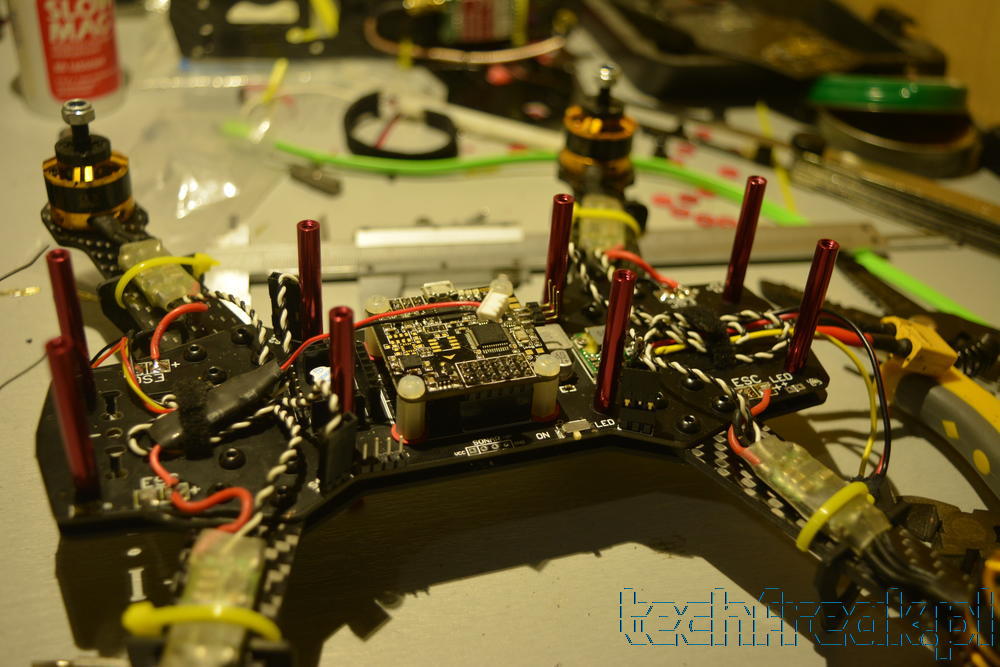
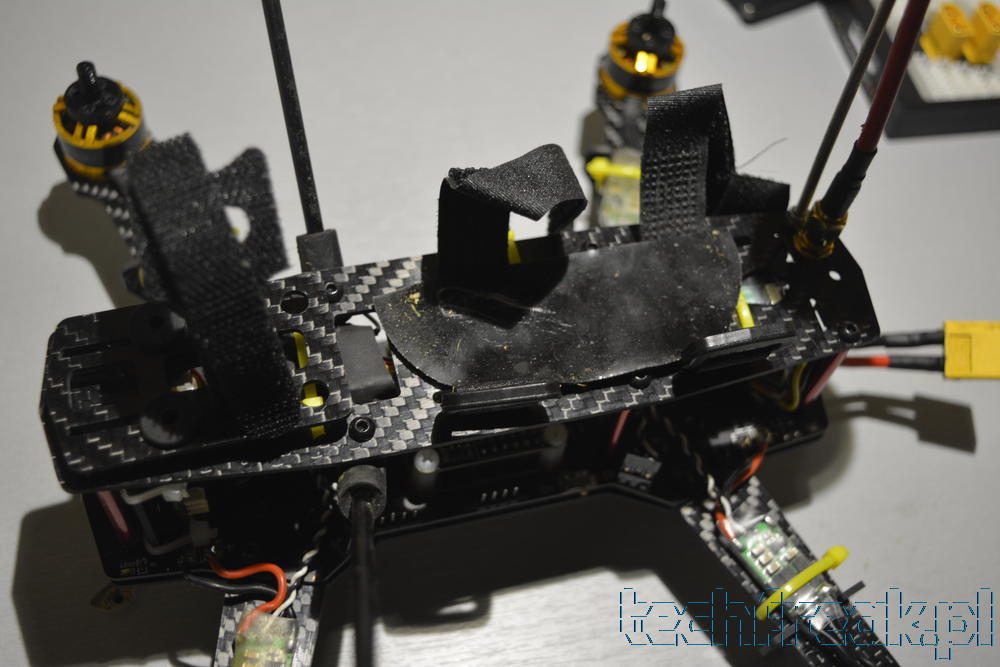
Tips: mocowanie baterii
Jak widzisz ja mocuje baterię na dwa rzepki. O ile przy normalnym lataniu jest ok. To przy twardym lądowaniu bateria albo wypadnie albo po którymś czasie wyrwą się kable zasilające. Trzeba było to jakoś zabezpieczyć. Wpadłem na pomysł aby wykorzystać lepiącą się podkładkę na telefon do samochodu. Koszt ok 9zł. A jest tak lepiąca że bateria nie spadnie w czasie lotu bez rzepek. Jednak nie można z nich zrezygnować.

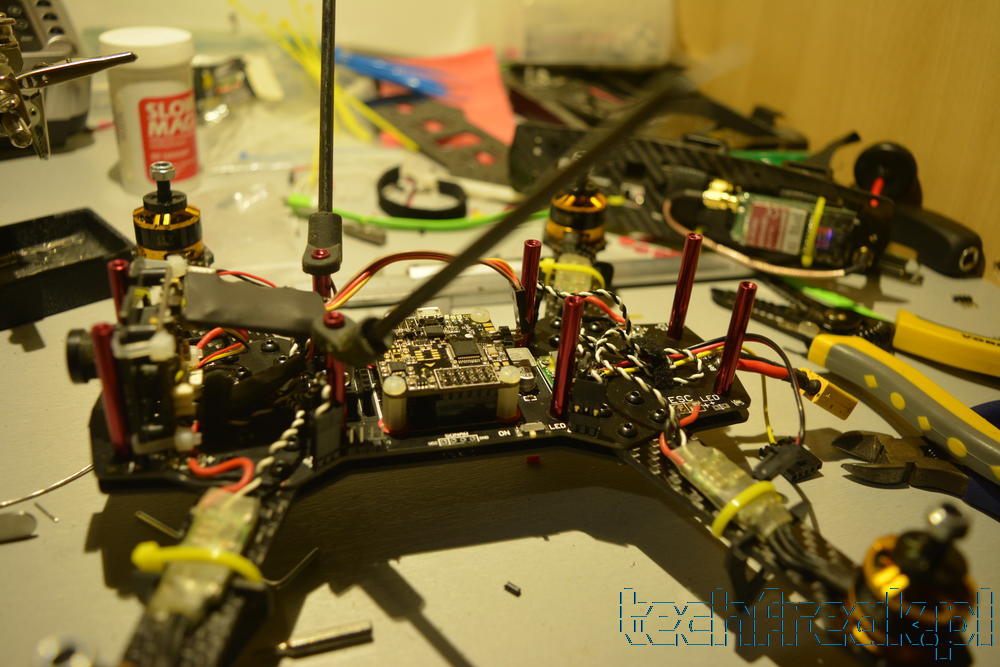
Koniec
Rama została już przetestowana na ostatnim spocie ale niestety nie działa mi jeden silnik i trzeba zakupić coś lepszego. A zapas silników 1806 wyprzedałem na rzecz nowych ale o tym później. Jeszcze jedna fotka o ostatniego latania.

Jak masz jakieś pytania proszę napisz w komentarzu. Postaram się odpowiedzieć.
Setup
Wklejam swoją obecną konfigurację w tabelce poniżej. Na maila dostaje wiele pytań o konfiguracje mam nadzieje że pomoże.
[table id=3 /]