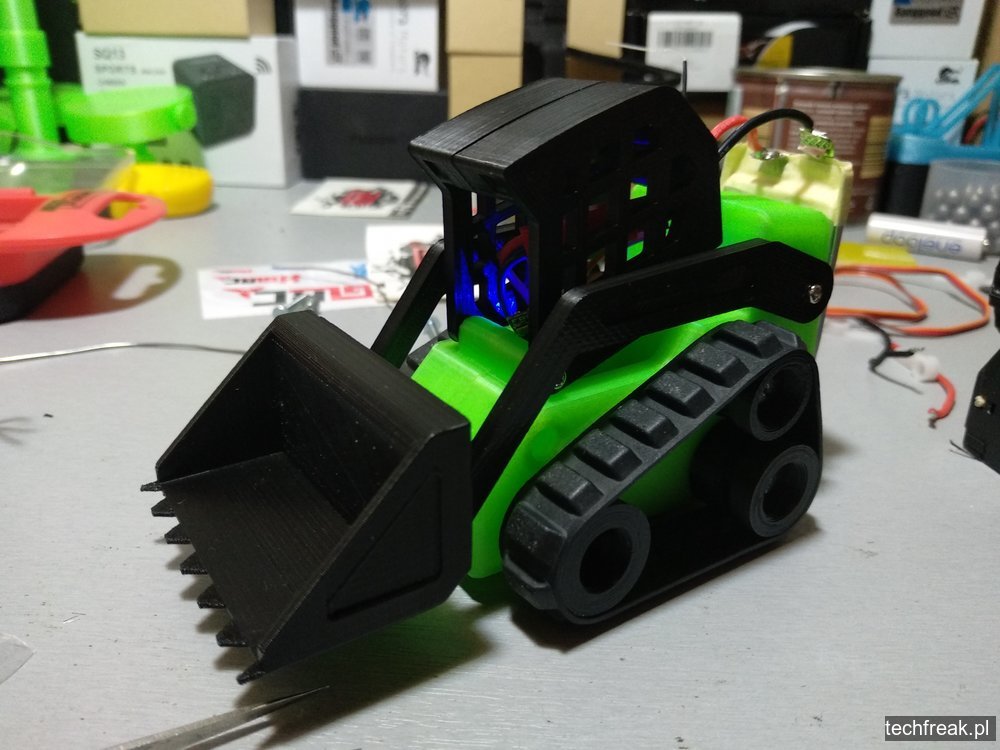
Masz drukarkę ale znudziło Ci się drukowanie wazonów na imieniny? Zobacz jak zrealizowałem projekt Mini Track Loader z thingiverse.
Przeglądając thingiverse znalazłem fajny projekt Mini Track Loader. Jest to mała ciężarówka budowlana znana też jako bobcat. W wersji do wydrukowania jest ona napędzana dwoma serwami SG-90 a sterowanie odbywa się poprzez odbiornik RC. Czyli sterowanie i napęd bardzo prosty, aparaturę Taranis QX7 już posiadam więc dodam w niej kolejny model. Odbiornik RC odbiera sygnał radiowy i zamienia go na PWM a serwomechnizmy posiadają regulator obrotów i odbierając ten sygnał, wprawiają w ruch silniczki.
Co buduje?
Co będzie potrzebne?
- Lutownica
- Wiertła 3mm, 5mm, 2mm
- Drukarka 3D lub wydrukowane części z
- Filament DevilDesign PLA dwa kolory czarny i jakiś do wyboru.
- 2x Gąsienice od LEGO 43903
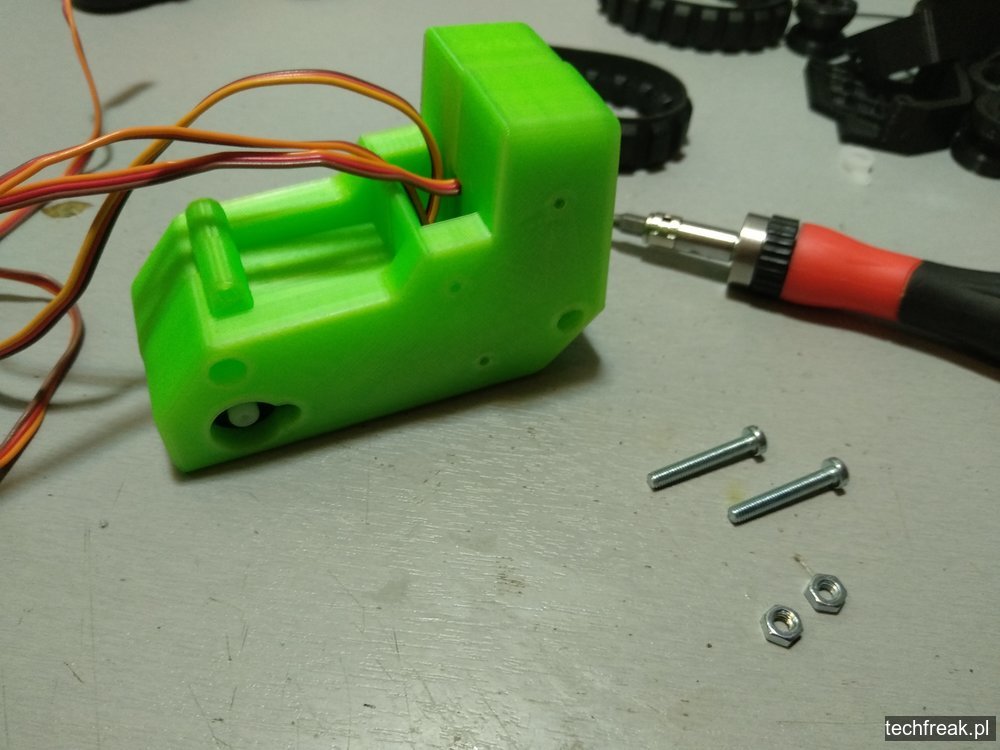
- Śrubki w większości od zestawów serw ale też do mocowań kół, M3x15mm, M3x10mm + dwie nakrętki. Widać wszystko poniżej na zdjęciach.
- Odbiornik RC
- 3x Serwo TowerPro SG90
- Aparatura jeśli nie posiadasz
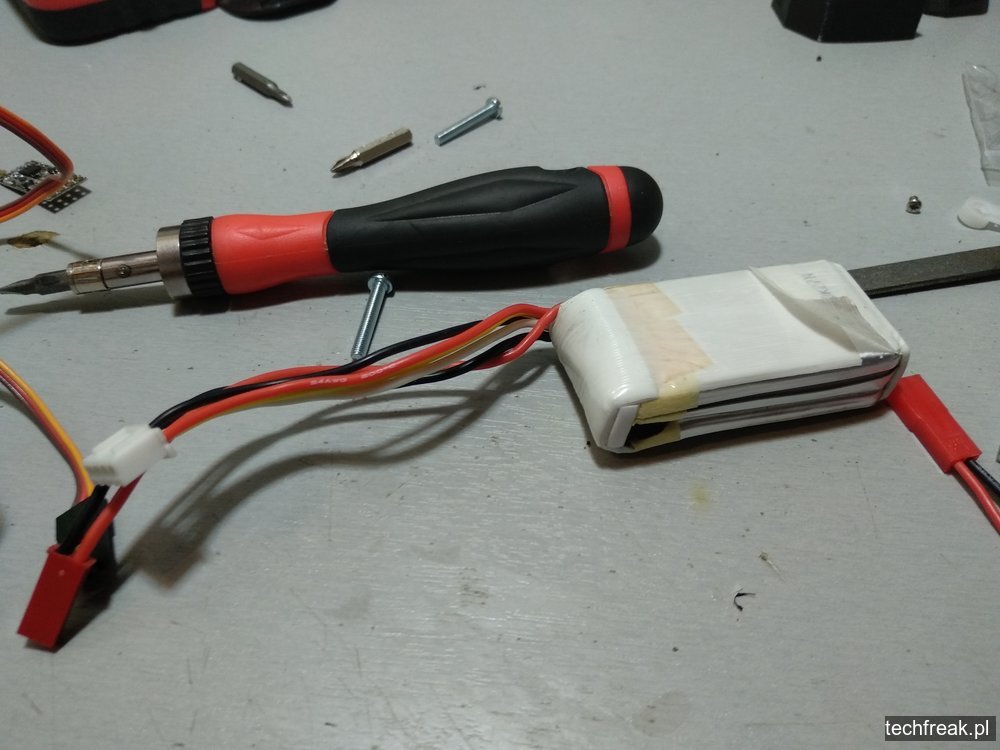
- Bateria Lipo 1S, 650mAh
- Złącza JST męskie i żeńskie
- ładowarka Lipo 1S max 4.2V
Zakupy:
- Odbiornik RC Frsky
- Apratura Taranis QX7
- Serwa SG90 Można taniej kupić w PL
- Drukarka 3D
- Lutownica Ts-100 (może być zwyczajna za 50 zł ;)
- Gąsienice z Allegro 3zł sztuka.
- Śrubki M3
- Złącza JST
- Ładowarka 1S
Drukowanie
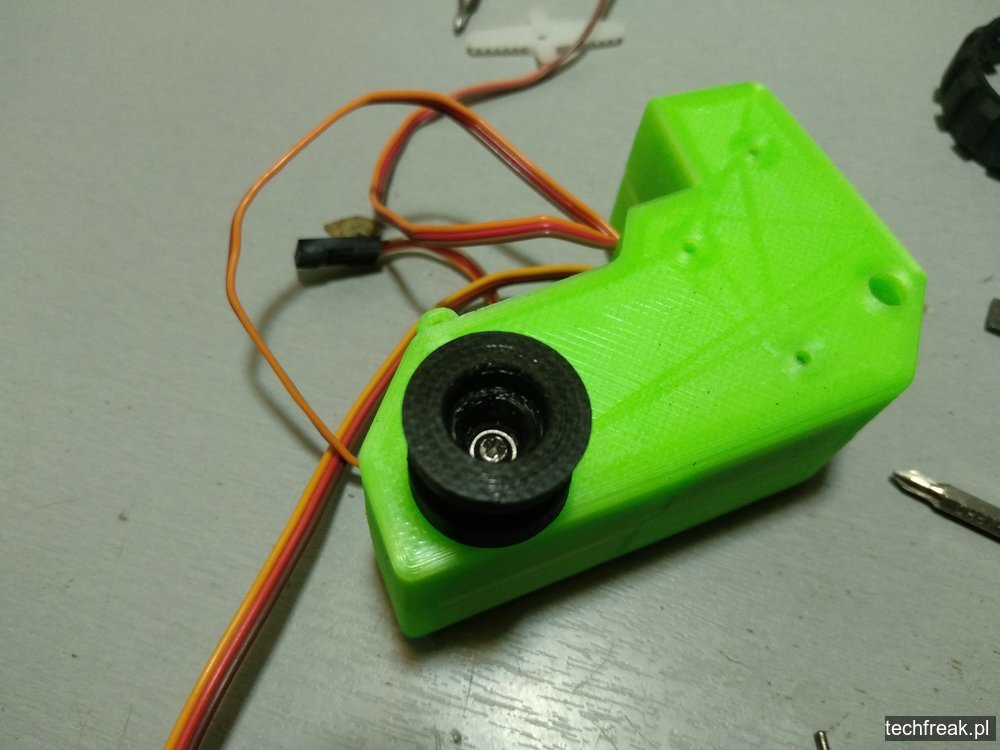
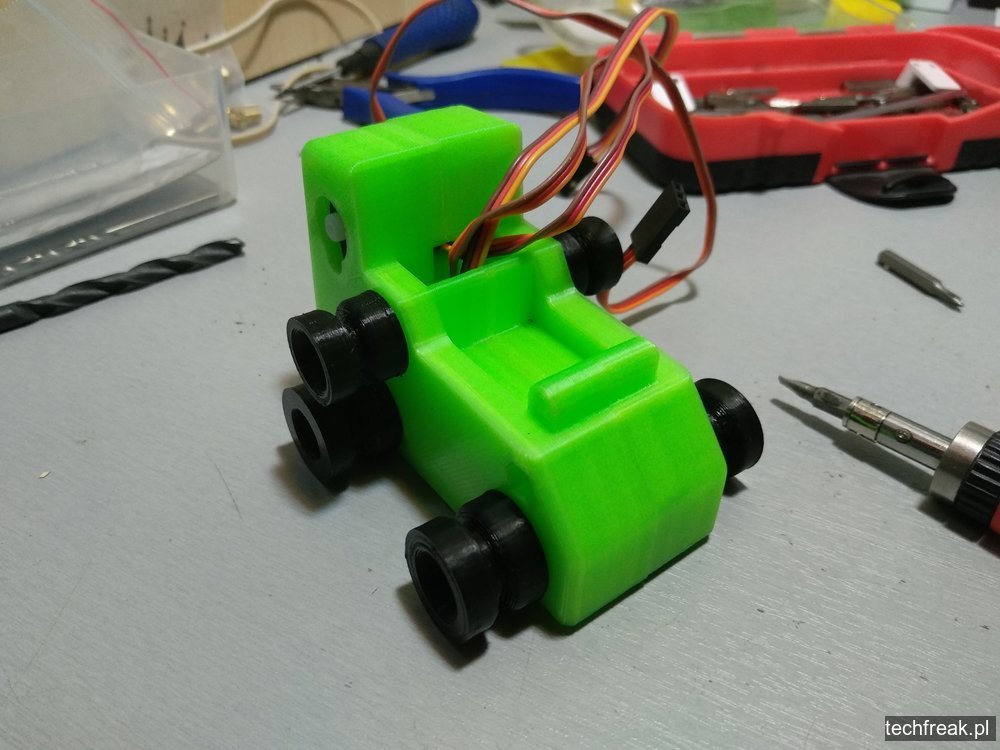
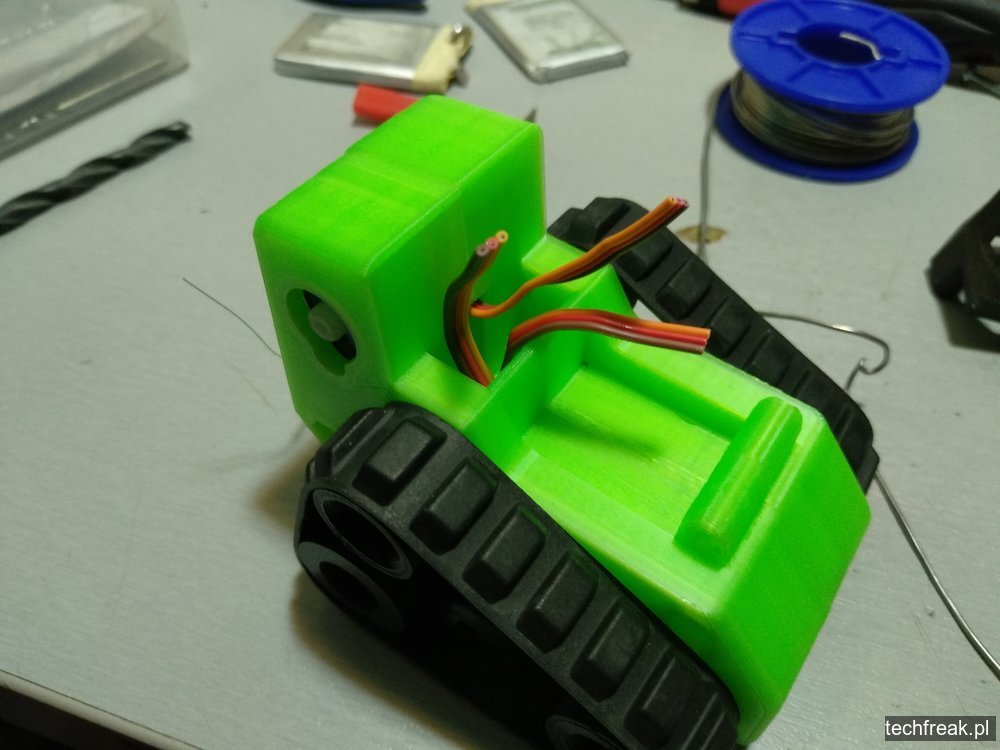
Niby wszystko jest do wydrukowania i powinno być według tego projektu ale serwa chciałem użyć SG90 bo miałem. Okazało się, że ktoś już zmiksował taki projekt i jest on pod tym linkiem. Więc z tego projektu trzeba wydrukować wszystko raz + jedną sztukę Pulley_SG90. Tak aby były dwa koła napędzające. Następnie z głównego projektu trzeba wydrukować Bucket, FrameA, FrameB, 2x UndrivenPulley, CocpitA, CocpitB, 2x SmallPulley. Reszta to akcesoria np, zamiast łyżki można wydrukować też pług albo widelec do palet. Można sobie dowolnie zamieniać te narzędzia.

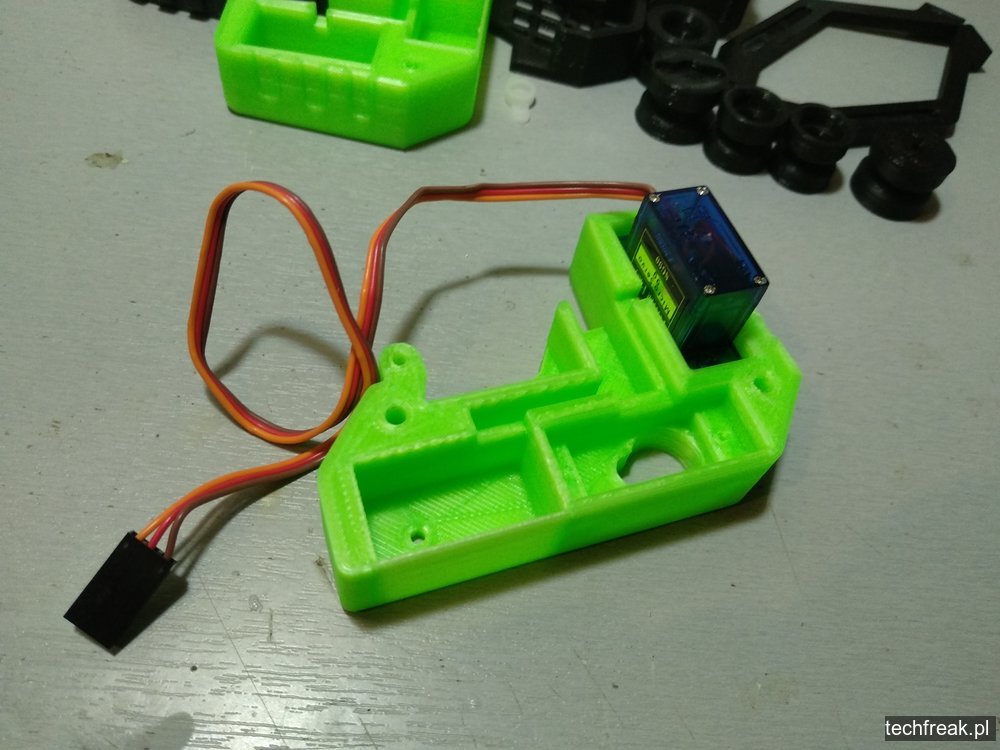
Serwa, serwomechanizmy
Aby serwa mogły napędzać pojazd trzeba przerobić dwie sztuki według tego artykułu https://techfreak.pl/serwomechanizm-towerpro-sg90-ciagly-obrot/.
Trzecie serwo do poruszania łyżką trzeba zamontować bez żadnych modyfikacji.
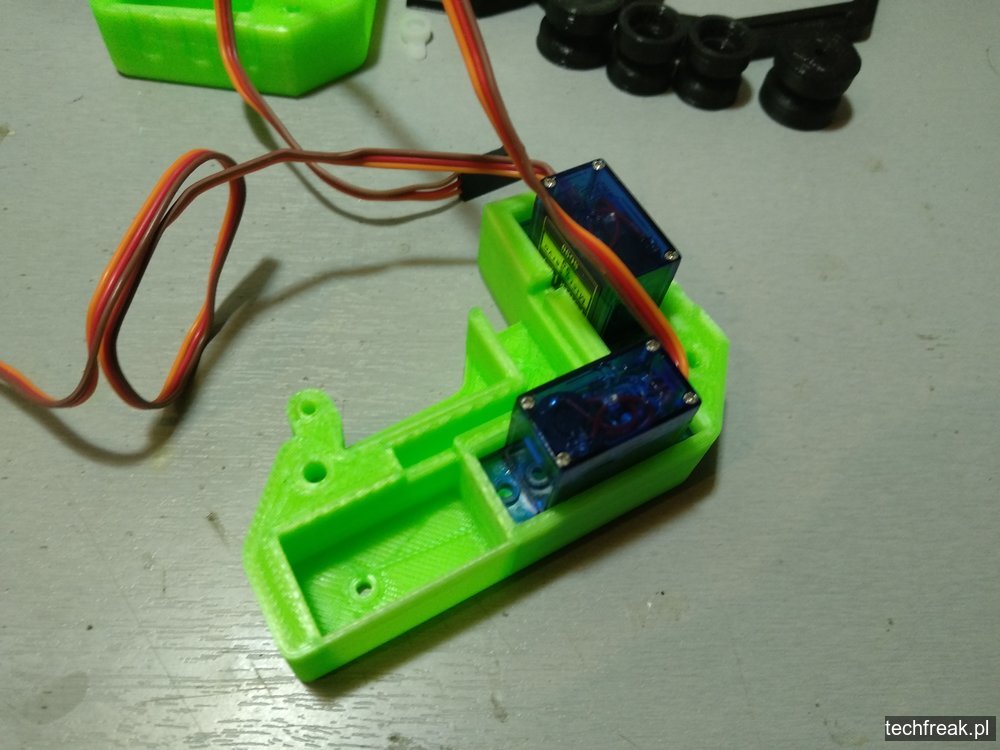
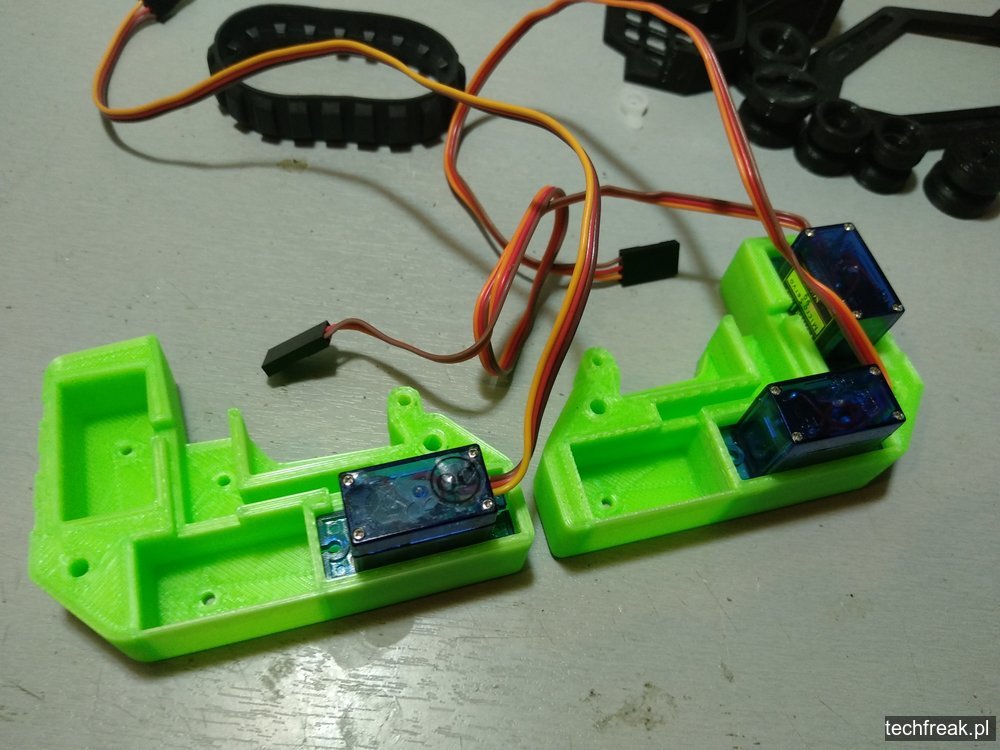
Składnie
W zestawie z serwami są śrubki, trzeba ja wykorzystać do przykręcania serw lub kół do obudowy.
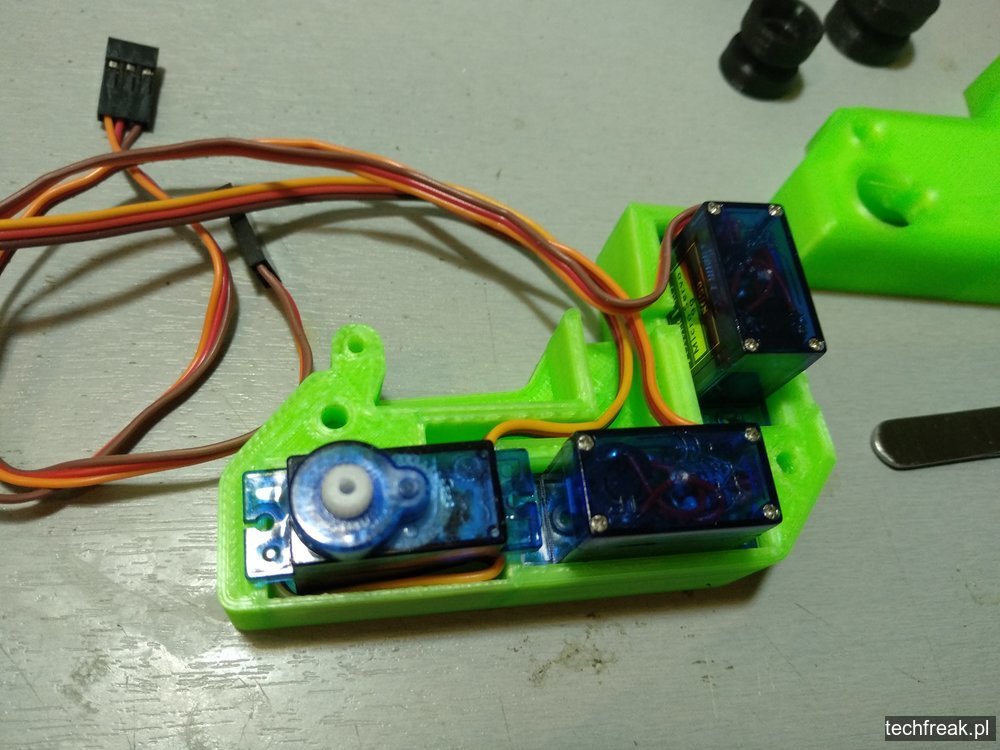




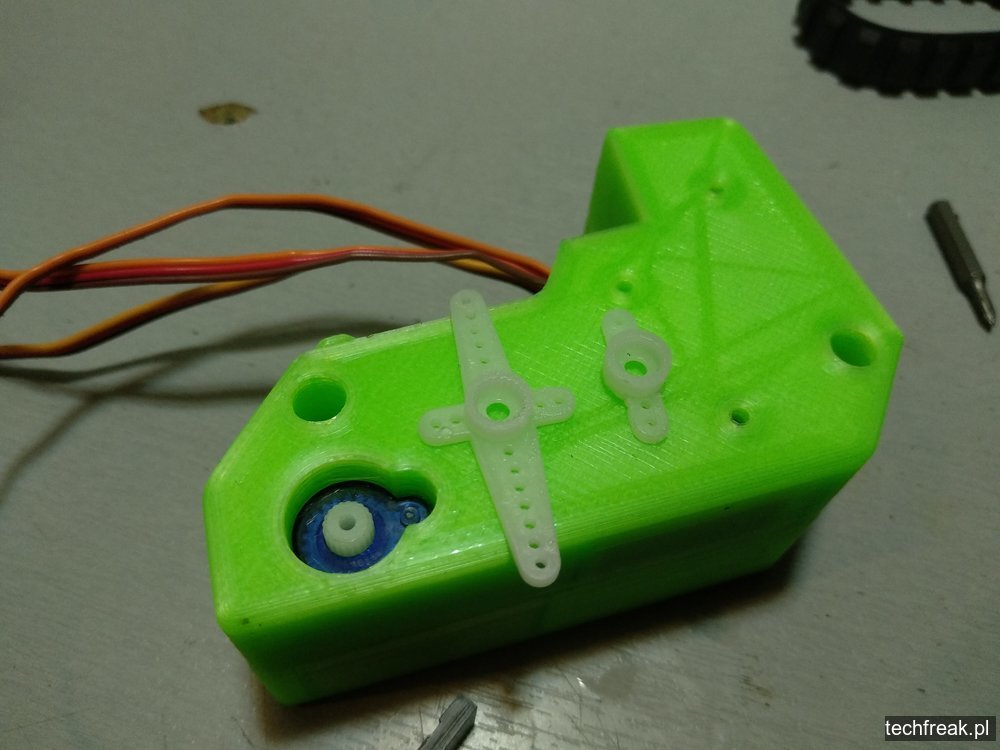
Białe orczyki trzeba przyciąć tak aby pasowały do kół napędzających.




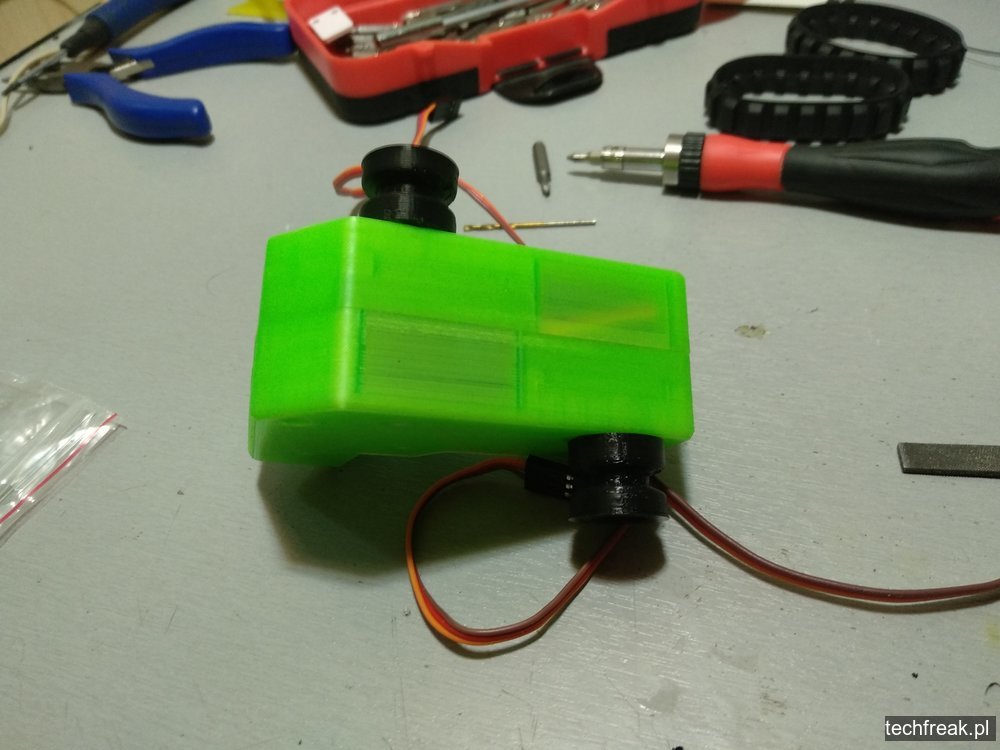

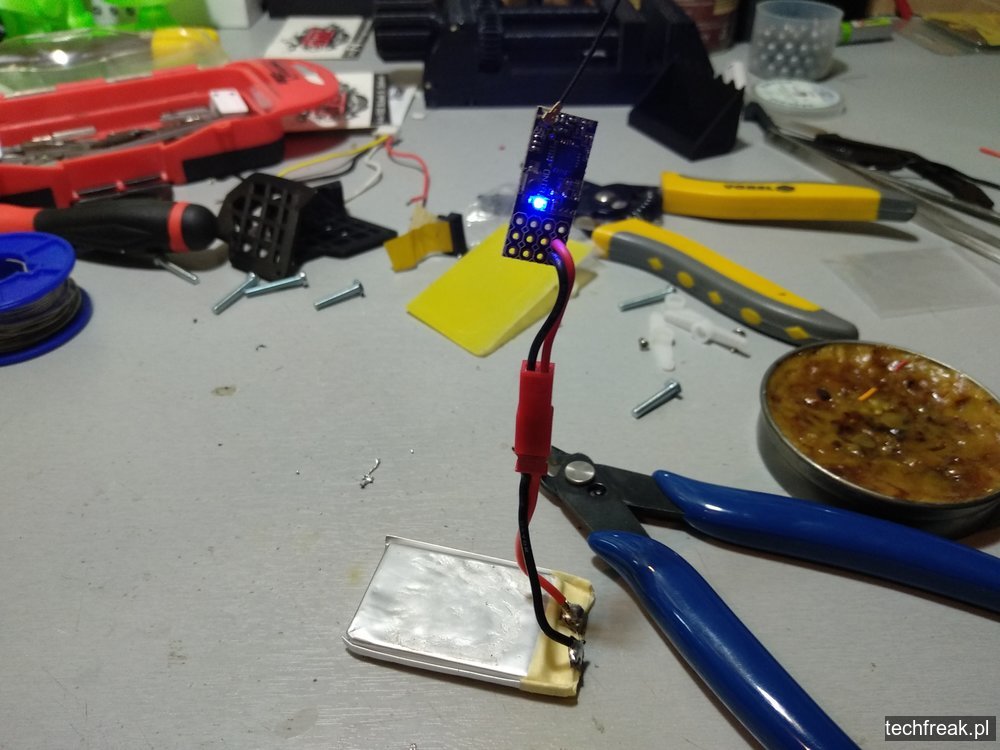
Miałem baterie Lipo 3S 650mAh więc rozłożyłem ją na cele tak aby uzyskać napięcie 1s czyli max 4.2V

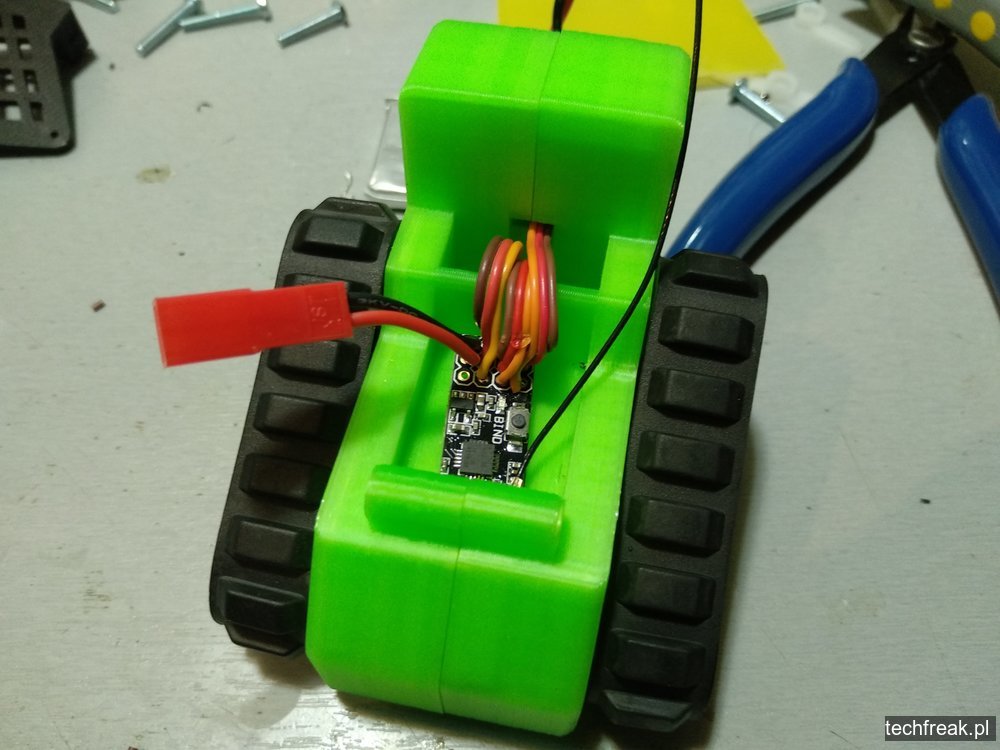
Podłączenie do odbiornika RC. Pierwszy kanał to łycha (gaz), drugi jedno serwo, trzeci drugie, czwarty kanał nie używany.

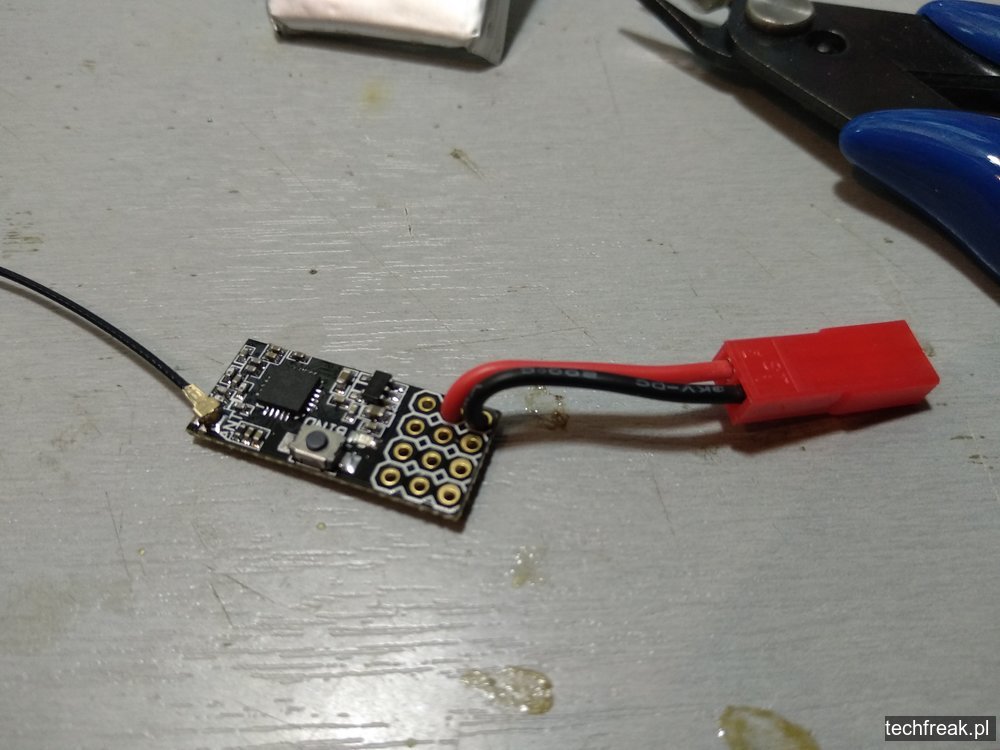
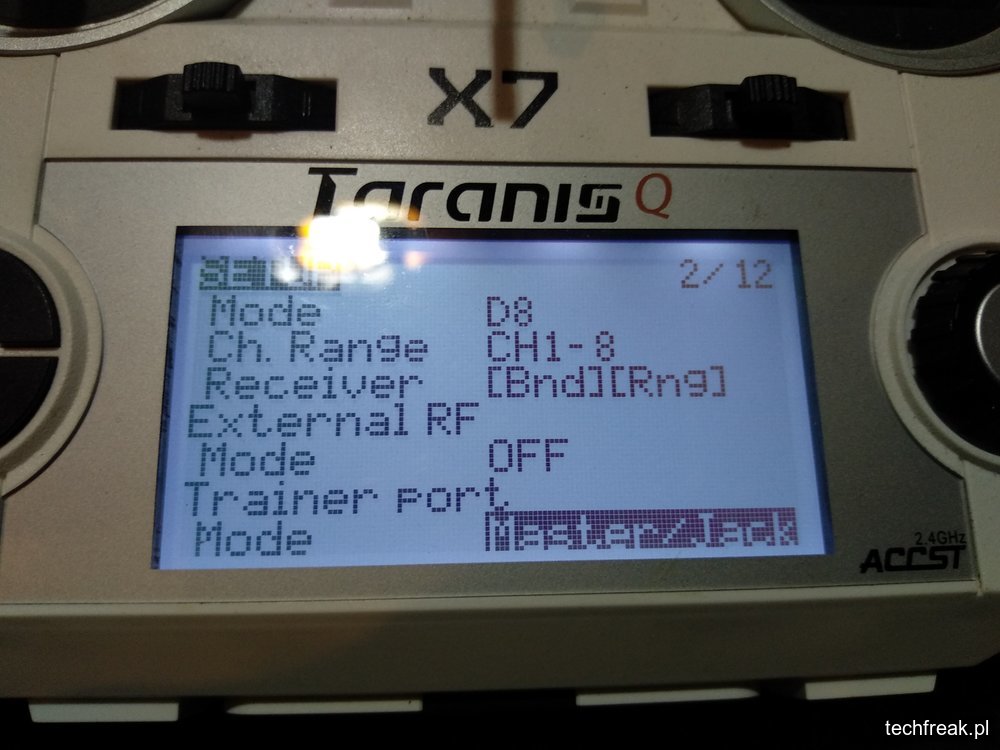
Poprawnie zbindowany odbiornik FrSky D8 z aparaturą świeci ciągłą diodą.
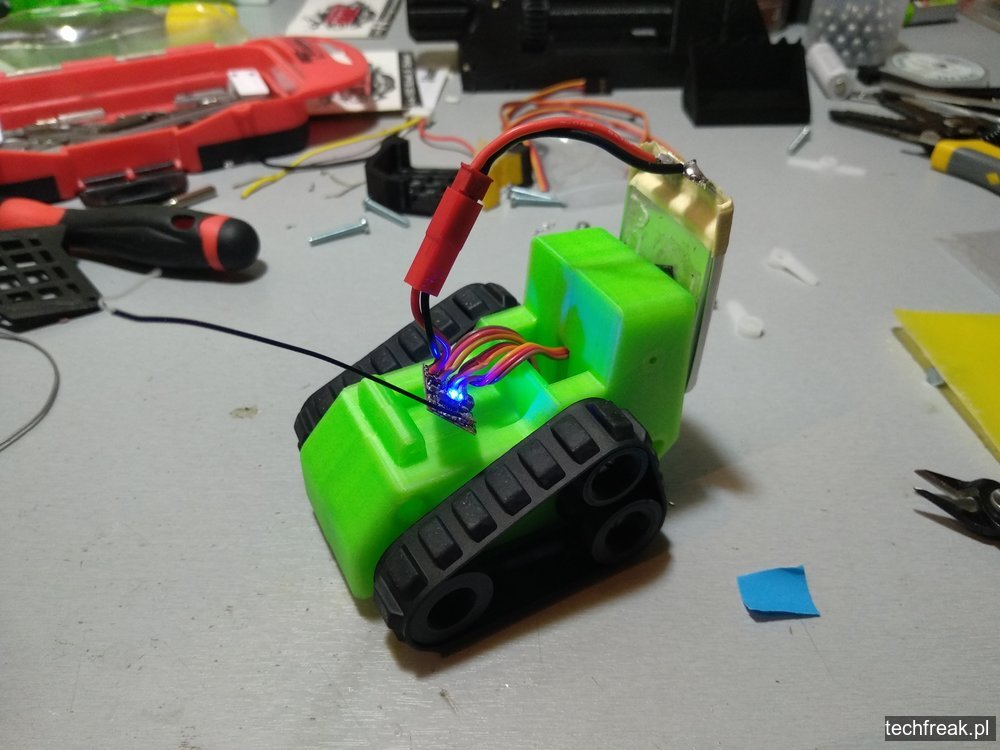

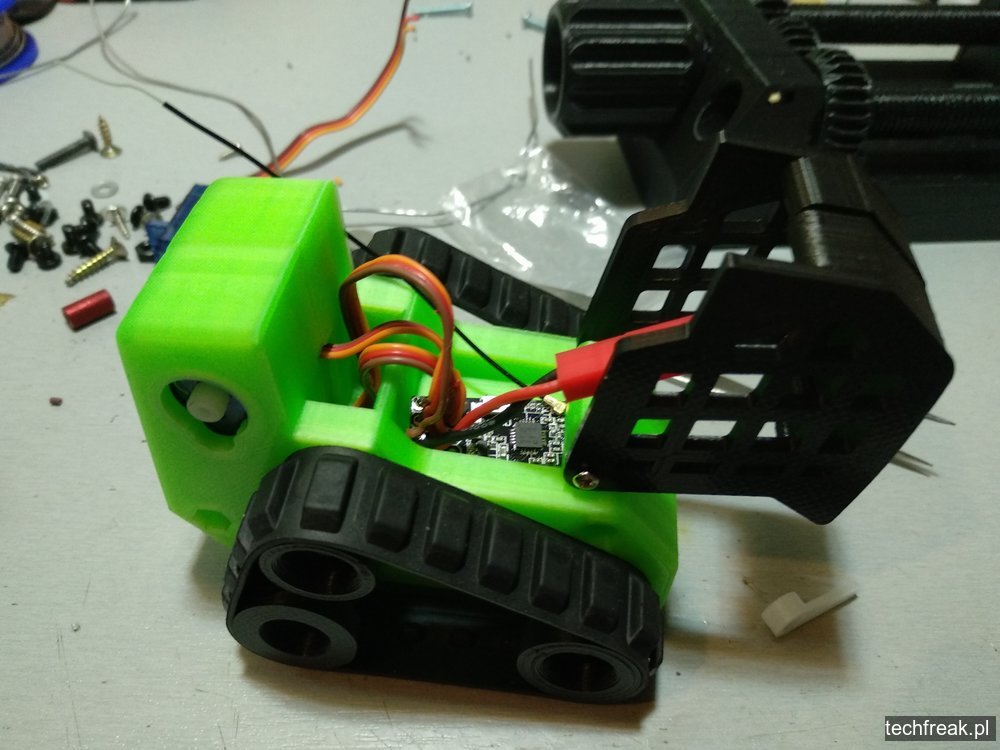



Łączenie kabiny odbywa się z pomocą kawałków filamentu.

Konfiguracja aparatury
Z tymi serwami to nie jest tak, że one działają jak tylko drążek się przesunie. Działają już po podłączeniu do prądu i kręcą się jak szalone. Jedno kręci się w jedną stronę drugie w drugą dlatego pewnie do tego momentu kreci Ci się bobcat w miejscu.
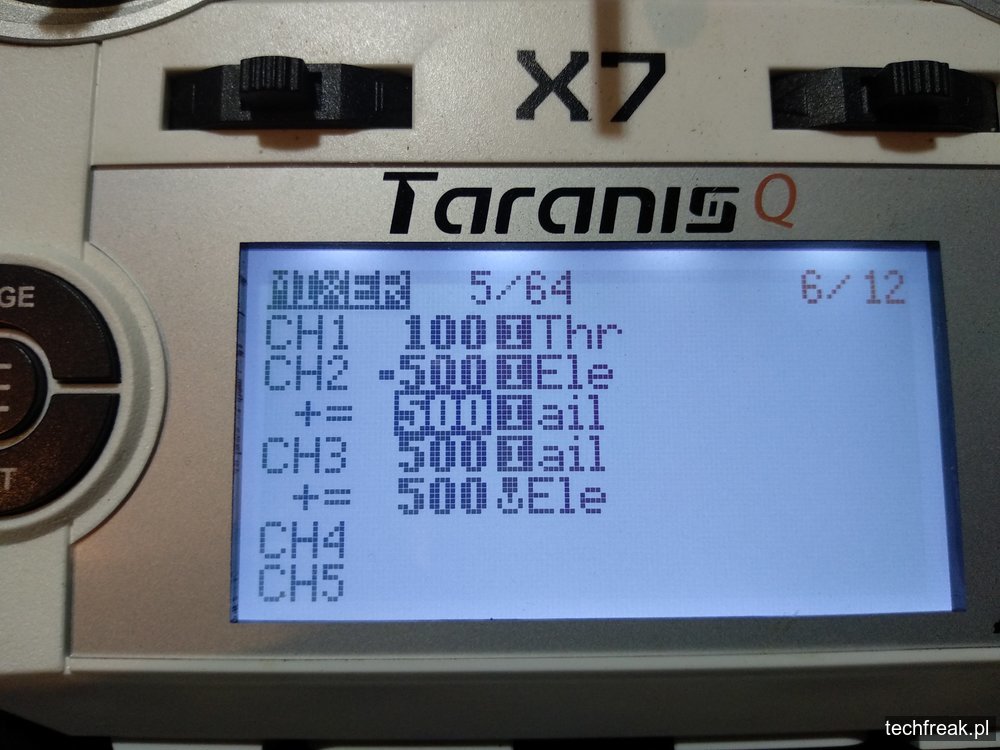
Jedno serwo to kanał 2, drugie to kanał 3, kanał pierwszy to łycha. Ja poniżej mam cztery kanały ELE channel 2, AIL channel 3, Trhotlle channel1, RUD channel 4 nie używany.
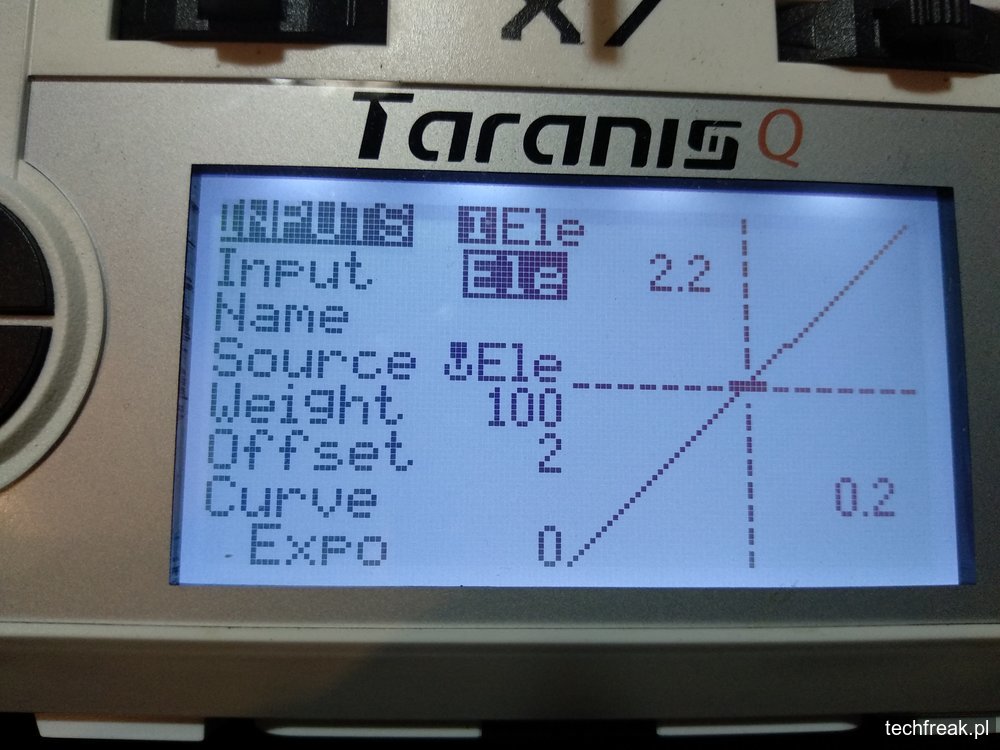
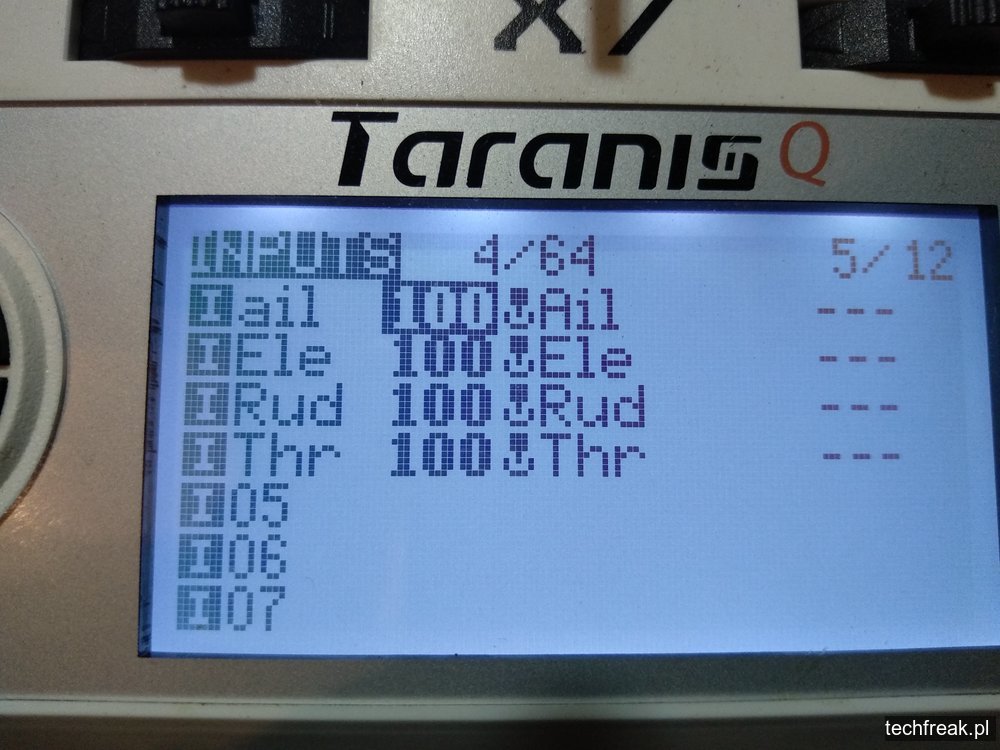
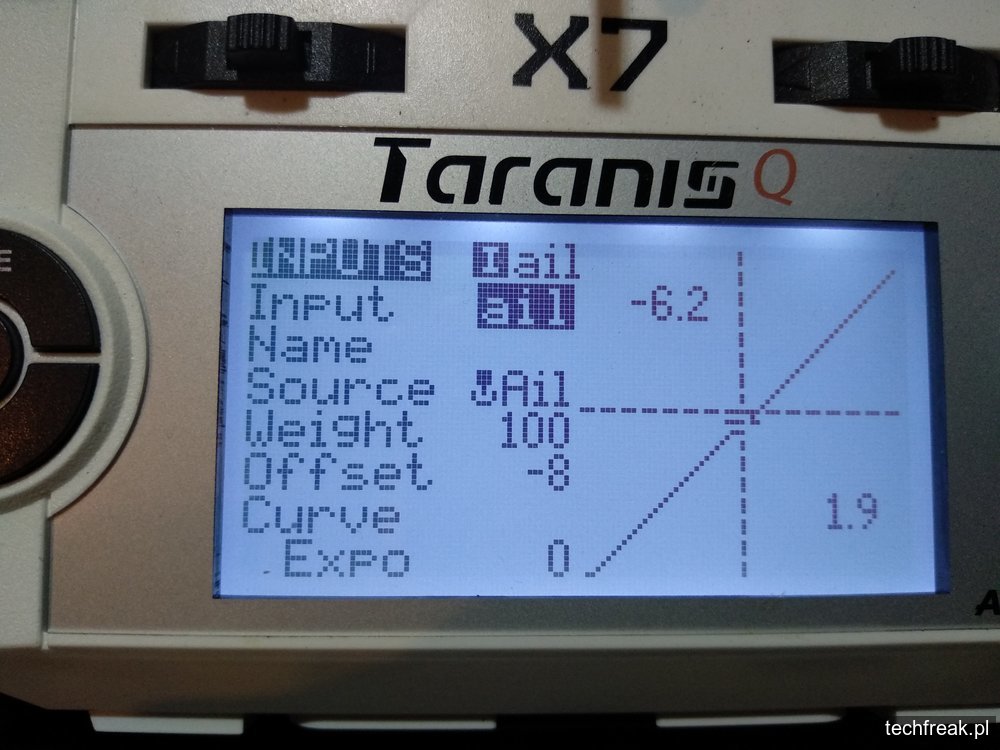
Trzeba skonfigurować aparaturę podobnie jak w przypadku skrzydła (delta) ale jest jeszcze jedna sprawa offset. Dzięki konfiguracji offsetu można dojść do stanu gdzie pojazd będzie się poruszał tylko po dotknięciu drążka. Jeśli nie będzie offsetu to jedno lub dwa serwa będą odjeżdżać. Trzeba eksperymentalnie dobrać sobie ta wartość przez próby w górę i dół. W sekcji INPUTS widać wartości offsetu. Kolejną sekcja jest MIXER. Tu zmieniłem weight ze 100 na 650.
Wideo
comments powered by Disqus